
APPENDIX
DISCRETE TIME SYSTEMS THEORY
B
As explained in Appendix A, automotive electronic control and instrumentation systems (as well as
virtually all other electrical systems) are implemented with digital electronics as at least some com-
ponent or subsystem. Digital controllers and/or signal processing subsystems incorporate one or more
microprocessors or microcontrollers, each having a stored program to run the system. Su ch systems are
fundamentally discrete time systems.
However, automotive electronic systems also incorporate analog or continuous time components
(e.g., sensors and actuators). In order for the digital subsystem to perform its intended operation, it
has, for its input/output variables, numerical values of the continuous input/output at discrete times
(t
k
where k ¼1, 2,…). The time between successive input/output values must be sufficient for the digital
system to perform all operations on the input to gener ate an output.
Although it is not necessary, most discrete time systems use periodic times to represent input/out-
put; that is, the kth discrete time is given by
t
k
¼ kT
s
k ¼ 1,2,3,⋯
where T
s
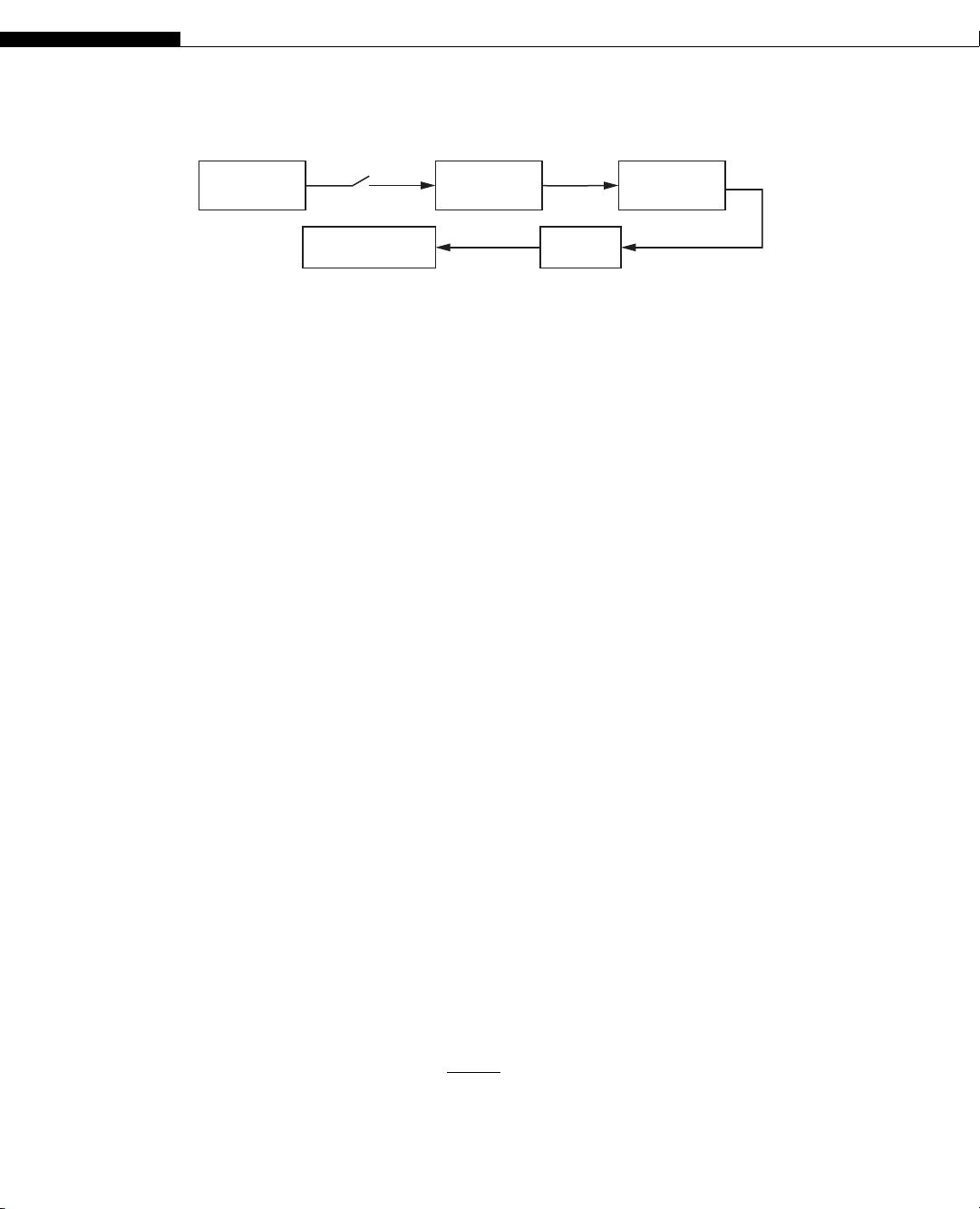
is the sample period. The configuration for a discrete time system with an embedded digital
system and an analog destination component is depicted in Fig. B.1.
In this figure, the source has a continuous time electrical signal v(t) that could, for example, be a
sensor output. The interface electronics-labeled A/D converter (which is modeled later in this appendix)
generates a sequence of numerical values called samples at each discrete time or “sample period” t
k
:
v
k
¼ v t
k
ðÞ
These samples must be in a format that can be input to the digital system. The input to the digital system
at t
k
is denoted x
k
, which is a digital (N bit) numerical value equal to v
k
; that is, the sampled variable v
k
becomes a binary number x
k
. The digital system generates an output y
n
associated with input sample x
n
(as well as previous samples depending on the operations performed). Although the destination
component might be a display device that can display the desired output numerical value, it may also
be an actuator requiring a continuous time electrical signal y(t). We assume here that the destination
component (e.g., a display or actuator) requires a continuous time electrical input. This continuous time
electrical signal is generated from the output y
n
via an output interface D/A converter. A system that is
partly continuous time along with one or more sampling operations is called a sampled data system or a
discrete time system.
It is important whe n explaining such systems for either design or performance analysis to develop
appropriate models for mixed continuous and discrete time systems. For the purpose of developing
such models, it is helpful to discuss initially only linear, time-invariant systems. In chapters that are
641


剩余22页未读,继续阅读

frank_technologies
- 粉丝: 13
- 资源: 92
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- RTL8188FU-Linux-v5.7.4.2-36687.20200602.tar(20765).gz
- c++校园超市商品信息管理系统课程设计说明书(含源代码) (2).pdf
- 建筑供配电系统相关课件.pptx
- 企业管理规章制度及管理模式.doc
- vb打开摄像头.doc
- 云计算-可信计算中认证协议改进方案.pdf
- [详细完整版]单片机编程4.ppt
- c语言常用算法.pdf
- c++经典程序代码大全.pdf
- 单片机数字时钟资料.doc
- 11项目管理前沿1.0.pptx
- 基于ssm的“魅力”繁峙宣传网站的设计与实现论文.doc
- 智慧交通综合解决方案.pptx
- 建筑防潮设计-PowerPointPresentati.pptx
- SPC统计过程控制程序.pptx
- SPC统计方法基础知识.pptx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论0