PID控制简易指南:从概念到实践
需积分: 28 97 浏览量
更新于2024-08-01
收藏 344KB PDF 举报
"PID(比例积分微分)控制器是一种常见的自动化控制算法,广泛应用于机械、气动和电子设备中。本文旨在通过实例解释PID的工作原理,帮助读者无需深入控制理论也能理解其基本操作和应用场景。"
PID控制器的核心是三个组成部分:比例(P)、积分(I)和微分(D)。这些元素协同工作,以调整系统的输出以减少与期望目标之间的误差。
1. 比例项(P):P项立即响应当前的误差大小,其输出与误差成正比。它能快速调整系统,但可能导致系统振荡或不稳定,因为它没有考虑误差的历史变化。
2. 积分项(I):I项考虑了过去的误差,通过积累误差来消除系统的长期偏移。它有助于使系统稳定在目标位置,但过度的积分可能导致系统响应过于缓慢或过冲。
3. 微分项(D):D项基于误差的变化率,预测未来误差的趋势,从而提前进行调整,有助于平滑系统的响应并减少振荡。然而,微分项对噪声敏感,可能会引入额外的波动。
文章通过以下三个示例来阐述PID的运用:
1. 电机驱动齿轮组:这是一个位置控制的例子,电机通过齿轮组移动到特定位置,位置传感器(如电位器)提供反馈。比例项提供即时调整,积分项确保长期精度,而微分项则帮助减少到达目标时的冲击和振动。
2. 精密定位系统:可能涉及更复杂的动态特性,例如高速或高精度要求。在这种情况下,PID参数的调整更为关键,以确保快速且无振荡的响应。
3. 恒温系统:控制环境温度的系统,需要平衡加热和冷却以保持恒定。比例项调整当前的加热或冷却输出,积分项消除温度偏差,微分项则预测温度变化,避免过冷或过热。
通过这些例子,我们可以理解PID控制器如何通过结合实时误差、历史误差和未来误差趋势来实现对不同系统的有效控制。在实际应用中,调整PID参数是关键,以适应特定系统的动态行为和性能需求。在微处理器普及的今天,将PID控制器集成到代码中已经成为一个相对简单的过程,使得PID控制成为许多自动化应用的首选方法。
这一机构中的磁力与台板移动的力独立开来,好处就是使得台板不受外力的
影响,缺点就是造成系统非常“滑”,控制起来有难度。另外,电子必须的一个
好的电流输出形放大器和非接触式位置传感器做起来也有挑战。可以预计,如果
是你做了这样一个项目(或者是接了个短期项目),你就是这个相当优秀的团队
中一员。
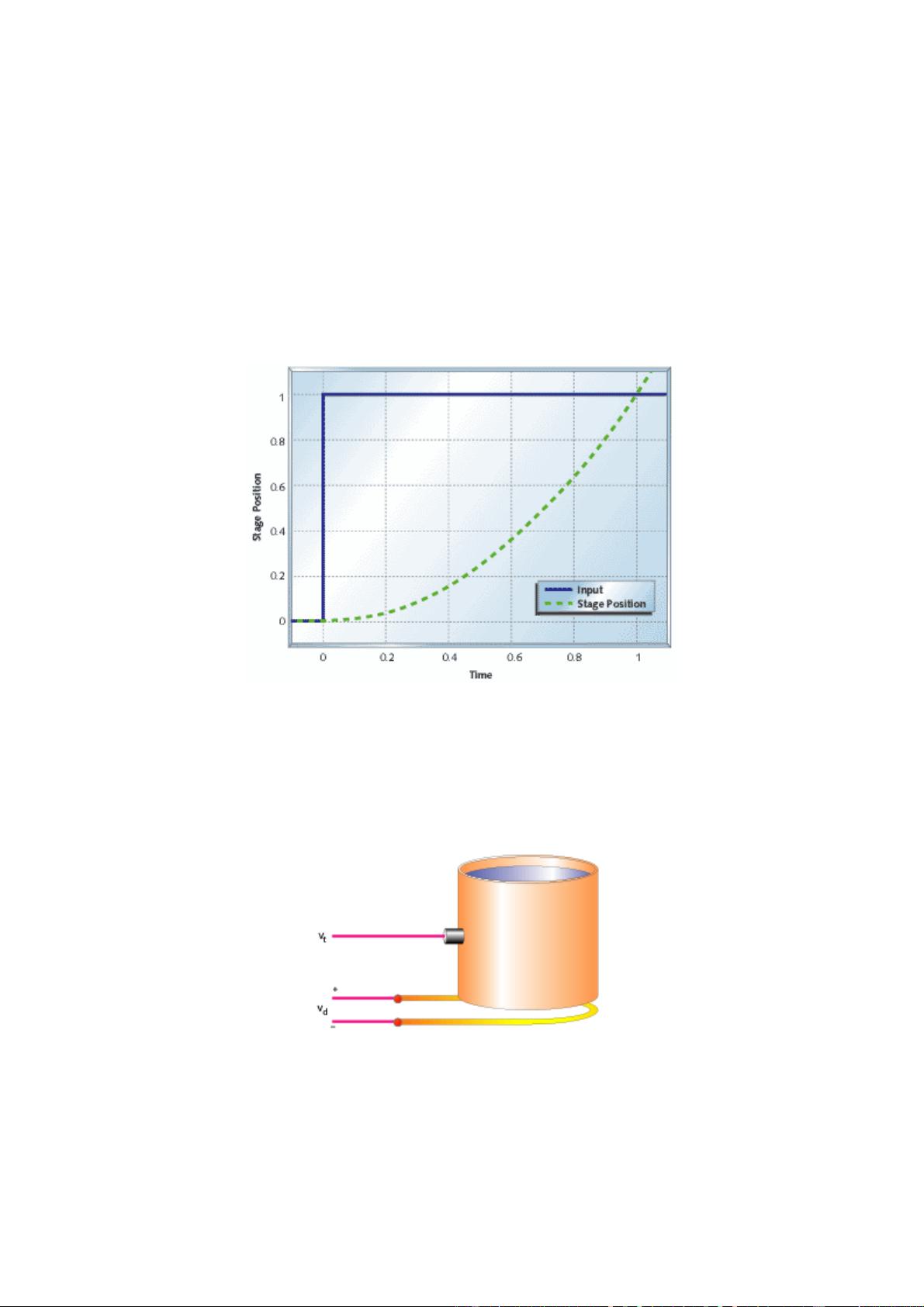
这个系统的运动方程非常简单,台板上的力只与驱动命令成比例关系,所以
系统的加速度与驱动输出也是成比例关系。系统自身的阶跃响应是一条抛物线,
见图 5。由于有惯性,台板动起来就会一直动,这会导致系统控制更加困难,这
个我会在后面讲到。
图 5:精密驱动器位置 vs. 时间
温度控制
第三个例子是一个加热器,图 6 显示了系统简单示意图。电加热器加热一个
大容器,通过温度传感装置来获得温度值。
图 6:加热器
加热系统往往具有非常复杂的响应,我准备忽略一些细节,给出一个非常近
似的模型,除非你对性能要求非常严格,那么一个精确的模型没什么必要。
图 7 显示了在 Vd(一定电压值?)下该系统的阶跃响应的变化。时间常量
剩余15页未读,继续阅读
2012-01-08 上传
2021-10-03 上传
2021-10-02 上传
2023-06-08 上传
103 浏览量
2009-07-29 上传

olieo
- 粉丝: 9
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- win-内存清理工具 不伤硬盘 Windows自带清理工具 unity3d C# 均可用
- 简历-求职简历-word-文件-简历模版免费分享-应届生-高颜值简历模版-个人简历模版-简约大气-大学生在校生-求职-实习
- Multinode-K8S-Cluster
- front_end_mobile_portfolio:Udacity前端纳米学位项目4
- ToolTipPopupWordTV:ToolTipopupWordTV是一个开放源代码Android库,允许开发人员通过从textview中选择一个单词来轻松打开包含详细信息的弹出窗口
- 计算机软件-编程源码-酒店管理系统2003.zip
- SMCMapViewer-dist:SMCMapViewer 项目的可分发文件
- MySQL面试题大汇总
- 建模仿真-基于Matlab+Simulink对光伏发电机系统进行建模-附项目源码-优质项目实战.zip
- 实验_surf_实验安排算法_图像识别_
- RFID实现娱乐场所综合管理系统.rar
- 99_bottles_of_beer
- fzzjoy.github.io
- 行业分类-设备装置-用于将玻璃基板用衬纸制成纸浆的纸浆再生装置.zip
- Python库 | arcus-0.0.1-py3-none-any.whl
- atelier-sculptureDeCode:使用git进行代码雕刻的工作坊
