结构相似性与视觉掩蔽结合的感知图像质量评估
65 浏览量
更新于2024-08-26
收藏 541KB PDF 举报
"基于结构相似性和视觉掩盖的感知图像质量评估"
在图像处理和计算机视觉领域,图像质量评估是至关重要的,因为它能衡量图像处理或传输后的效果,对图像的清晰度、失真度以及人眼观感进行量化。本文提出的"感知图像质量评估(PIQA)"方法结合了结构相似性和视觉掩蔽效应,以更准确地模拟人类视觉系统(HVS)对图像质量的感知。
首先,PIQA中的结构比较度量被改进,利用结构张量来增强其描述全局区域结构信息的能力。结构张量是一种用于分析图像局部结构的工具,可以有效地捕捉图像的边缘和纹理信息。在模糊或噪声图像中,传统的结构比较可能无法准确识别这些信息,而改进的结构张量则能更有效地处理这些问题。
其次,考虑到人类视觉系统的感知特性,PIQA引入了对比度掩蔽和邻域掩蔽的概念。对比度掩蔽是指在高对比度区域,人眼对噪声或失真的敏感度会降低;而邻域掩蔽则是指在相邻像素的影响下,人眼对某些失真的察觉也会减弱。通过将这两种掩蔽效应整合到对比度比较度量中,PIQA能更好地模拟HVS的实际感知行为。
最后,PIQA将亮度比较、结构比较和对比度比较这三个度量综合起来,计算出一个整体的PIQA度量值。这种方法的优势在于,它不仅考虑了图像的整体结构和局部细节,还考虑了人眼在观察图像时的生理和心理因素,从而提供了一个更全面、更接近人眼感知的图像质量评估。
通过与现有的客观图像质量评估标准如多尺度结构相似性(MS-SSIM)、视觉信噪比(VSNR)和视觉信息保真度(VIF)进行比较,仿真结果显示,PIQA与HVS的感知过程高度一致,并且在性能上有所提升。这表明PIQA是一种有效的、适用于多种图像条件的图像质量评估方法,特别是在处理模糊和噪声图像时,能够提供更为精确的质量评估结果。
这篇研究论文提出了一个创新的图像质量评估框架,它结合了结构分析和视觉掩蔽理论,提升了评估的准确性和鲁棒性。这一方法对于图像处理算法的优化、图像编码和传输质量控制等领域具有重要的实际应用价值。
contrast of x, and
s
xy
measures the tendency of x and y to
vary together.
The SSIM index is superior over MSE, SNR, PSNR, and
there are three key factors leading its success. First, the
SSIM considers image degradations as perceived changes
in structural information variation, instead of estimating
perceived errors. Second, the SSIM is a top-down approach,
mimicking the hypothesized functionality of the overall
HVS. Third, the problems of natural image co mplexity and
decorrelation are avoided to some extent because the SSIM
does not attempt to predict image quality by accumulating
the errors associated with psychophysically understood
simple patterns.
However, the SSIM has some weakness. It is difficult to
distinguish the distortion level between a blurred image
and a noisy image. For example, a very blurred image will
has a higher SSIM value than a noisy image with low noise
level (see Fig. 1). What is wrong with SSIM? We find that
the structure measure in SSIM only computes the related
coefficient of pixel value between the reference image and
the distorted image using space domain statistics, so it
can not reflect image edge and texture structural informa-
tion very well.
To overcome this drawback, one solution is to provide
more accurate measure for the structure distortion. For
example, Chen et al. [18] developed a gradient-based
structural similarity. The primary reason of performance
improvement in GSSIM is that it pays more attention to
the edges and details of images, which represents the
most important structural information of images.
2.2. Improved structure comparison measure
An important aspect of the HVS perception is its sen-
sitivity to image structure. In general, structural magnitude
and structural orientation are two important attributes of
image geometrical structure. Furthermore, philosophy
experiments show that HVS is more sensitive to structural
orientation. Hence, the orientation field of the geometrical
structure is more important in the structure similarity
measure.
It is well known that the structure tensor can capture
the image structure information very well. Especially,
it could be used to estimation the structural orientation.
In this section, the structural orientation is utilized to
measure the structure similarity.
The structure tensor of an image is formulated as a
symmetric and positive semi-definite matrix:
J
r
ð
r
u
s
Þ¼G
r
ð
r
u
s
r
u
s
Þ¼
J
11
J
12
J
12
J
22
!
, ð3Þ
where convolving u with a Gaussian kernel G(0,
s
2
) makes
orientation estimation robust against noise at scales
smaller than
s
. Convolving the tensor
r
u
s
r
u
s
with a
Gaussian kernel G(0,
r
2
) makes orientation estimation
more accurate, especially at corners. In this paper, we
set the standard deviation
s
¼0.5,
r
¼0.5. Moreover, the
corresponding eigenvectors
$
and
n
as follows,
w ¼
2J
12
J
22
J
11
þ
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
ðJ
22
J
11
Þ
2
þ4J
2
12
q
0
@
1
A
,
$
¼
w
:w:
,
n
¼
$
?
,
ð4Þ
where the eigenvector
$
points in the dominant orienta-
tion with the largest contrast, and the eigenvector
n
points
in the structure orientation with the smallest contrast. They
are shown in Fig. 2.
Different from the SSIM index, we utilize the structure
tensor to estimate the structure orientation similarity
between reference image x and distorted image y. First,
we should compute their eigenvectors:
n
x
¼(
n
x1
,
n
x2
)and
n
y
¼(
n
y1
,
n
y2
). Then the corresponding geometrical structure
orientation angle
y
x
,
y
y
and their cosine-squared value
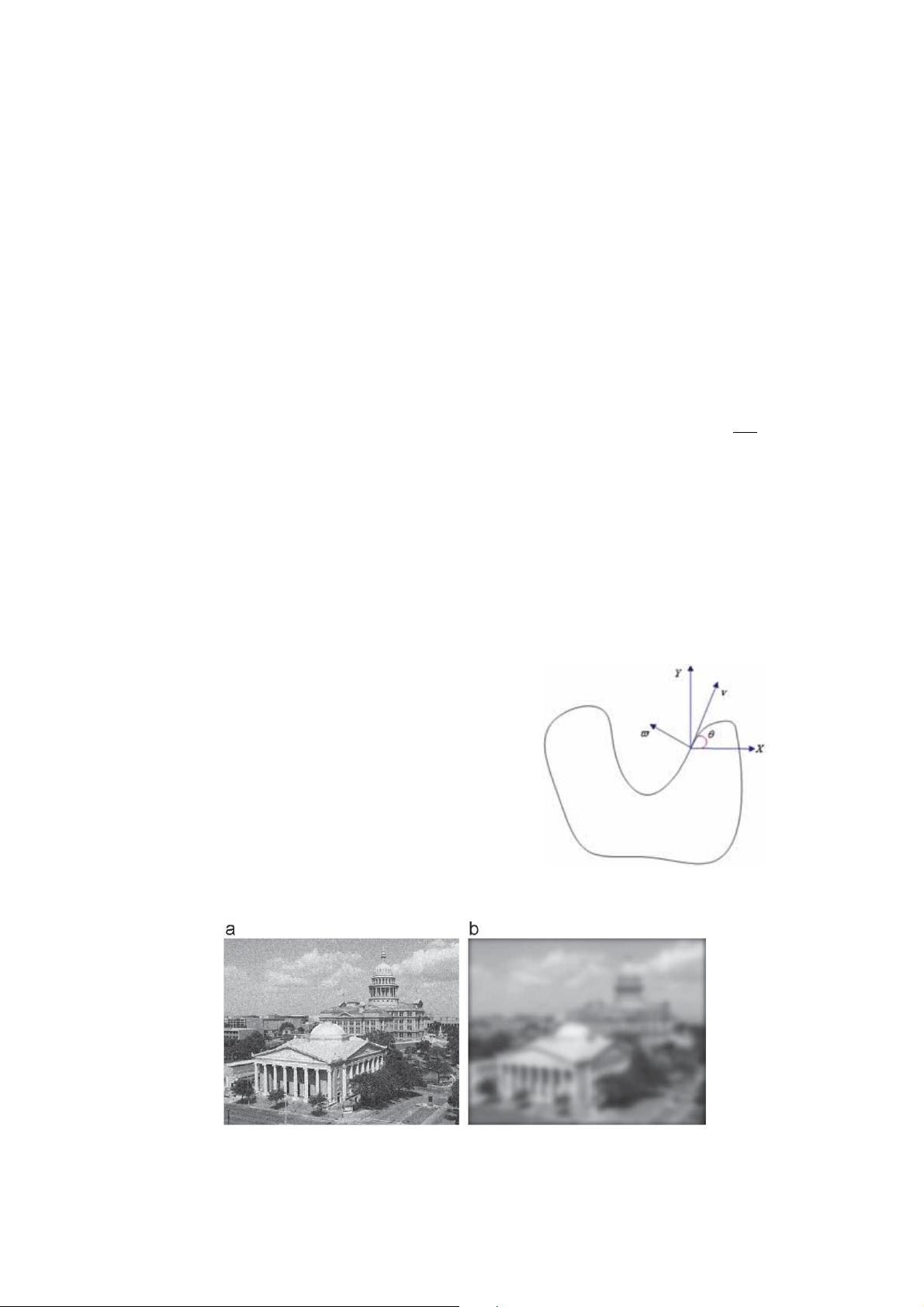
Fig. 1. Comparing the SSIM value of different distorted type images. (a) noisy image, SSIM¼0.4332 (b) blurred image, SSIM¼0.4678.
Fig. 2. Structure tensor.
X. Fei et al. / Signal Processing: Image Communication 27 (2012) 772–783774
剩余11页未读,继续阅读
534 浏览量
171 浏览量
346 浏览量
102 浏览量
2022-07-01 上传
2022-07-01 上传
2022-08-03 上传
120 浏览量
点击了解资源详情

weixin_38600253
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- VB通过Modbus协议控制三菱PLC通讯实操指南
- simfinapi:R语言中简化SimFin数据获取与分析的包
- LabVIEW温度控制上位机程序开发指南
- 西门子工业网络通信实例解析与CP243-1应用
- 清华紫光全能王V9.1软件深度体验与功能解析
- VB实现Access数据库数据同步操作指南
- VB实现MSChart绘制实时监控曲线
- VC6.0通过实例深入访问Excel文件技巧
- 自动机可视化工具:编程语言与正则表达式的图形化解释
- 赛义德·莫比尼:揭秘其开创性技术成果
- 微信小程序开发教程:如何实现模仿ofo共享单车应用
- TrueTable在Windows10 64位及CAD2007中的完美适配
- 图解Win7搭建IIS7+PHP+MySQL+phpMyAdmin教程
- C#与LabVIEW联合采集NI设备的电压电流信号并创建Excel文件
- LP1800-3最小系统官方资料压缩包
- Linksys WUSB54GG无线网卡驱动程序下载指南
