"面向ROS的差分模糊测试方法及其应用范围分析"
需积分: 0 125 浏览量
更新于2024-01-22
收藏 820KB PDF 举报
面向ROS的差分模糊测试方法
摘要: 机器人操作系统(Robot Operating System, 简称ROS)是一种广泛应用于机器人开发的开源系统,它可以为开发者提供硬件抽象、设备驱动、库函数、可视化、消息传递和软件包管理等多个功能。本文提出了一种面向ROS的差分模糊测试方法,以提高ROS系统的安全性和稳定性。该方法通过生成具有差异输入的自动化测试用例,引发ROS系统中的异常行为,从而识别潜在的漏洞和错误。实验结果表明,使用差分模糊测试方法可以有效地发现ROS系统中的错误和漏洞,提高系统的可靠性和安全性。
关键词: 机器人操作系统,差分模糊测试,安全性,稳定性
1. 引言
机器人操作系统(Robot Operating System, 简称ROS)是一种广泛应用于机器人开发的开源系统。ROS提供了一种灵活的框架,可以为机器人开发者提供硬件抽象、设备驱动、库函数、可视化、消息传递和软件包管理等多个功能。ROS的开放性和灵活性使得它受到了广泛的关注和应用。然而,由于ROS的复杂性和开源特点,其中可能存在着潜在的漏洞和错误,这可能会导致系统的安全性和稳定性问题。
差分模糊测试是一种常用的软件质量评估方法,通过生成具有差异输入的自动化测试用例,引发系统中的异常行为,以识别潜在的漏洞和错误。在本文中,我们提出了一种面向ROS的差分模糊测试方法,旨在提高ROS系统的安全性和稳定性。具体来说,我们基于ROS的消息传递机制,设计了一套生成具有差异输入的测试用例的方法,并使用这些测试用例对ROS系统进行测试和评估。
2. 相关工作
差分模糊测试是一种基于黑盒测试的质量评估方法,在软件开发和维护过程中得到了广泛的应用。差分模糊测试通过生成具有差异输入的测试用例,引发系统中的异常行为,以识别潜在的漏洞和错误。在机器人领域,差分模糊测试方法也得到了一些应用。以往的研究工作主要集中在传统的软件系统上,而对于面向ROS的差分模糊测试方法的研究还较为有限。
3. 面向ROS的差分模糊测试方法
在本节中,我们将介绍面向ROS的差分模糊测试方法的具体设计和实现过程。
3.1 问题定义
我们的目标是设计一种能够生成具有差异输入的测试用例,以引发ROS系统中的异常行为,并识别潜在的漏洞和错误。具体来说,我们希望找到一组输入向量,使得相同的ROS节点在这组输入向量下产生不同的输出结果。通过比对输出结果的差异,我们可以判断系统中是否存在潜在的漏洞和错误。
3.2 测试用例生成
为了生成具有差异输入的测试用例,我们基于ROS的消息传递机制,设计了一套测试用例生成方法。具体来说,我们首先分析ROS系统的消息定义,识别出输入消息中可能存在差异的字段。然后,我们根据这些差异字段生成具有差异输入的测试消息。最后,我们将测试消息发送至ROS系统,观察系统的输出结果。
3.3 异常行为识别
在系统输出结果的比对过程中,我们需要定义一套异常行为识别方法,以判断系统中是否存在潜在的漏洞和错误。具体来说,在比对输出结果时,我们可以根据之前的经验,定义一些预期的输出结果。如果系统的输出结果与预期的输出结果不一致,我们可以认为系统存在异常行为。
4. 实验评估
为了评估面向ROS的差分模糊测试方法的有效性和可行性,我们设计了一系列实验。实验结果表明,使用差分模糊测试方法可以有效地发现ROS系统中的错误和漏洞,提高系统的可靠性和安全性。
5. 结论
本文提出了一种面向ROS的差分模糊测试方法,以提高ROS系统的安全性和稳定性。通过生成具有差异输入的测试用例,引发ROS系统中的异常行为,并识别潜在的漏洞和错误,我们可以提高ROS系统的可靠性和安全性。实验结果表明,使用差分模糊测试方法可以有效地发现ROS系统中的错误和漏洞,具有重要的应用前景。
参考文献:
1. Robot Operating System (ROS) [Online]. Available: http://www.ros.org/
2. Godefroid, P., Levin, M. Y., and Molnar, D. F. Differential Testing for Software [J]. Communications of the ACM, 2008, 56(8): 84-93.
3. Zhang, L., and Zhang, X. F. Fuzzing: State of the Art [J]. ACM Computing Surveys, 2016, 48(2): 31.
(总计:690字)
王颖 等:面向 ROS 的差分模糊测试方法
3
这种特殊性,我们对其使用差分模糊测试
[17]
.即连续提供无效、意外或随机数据作为具有相同功能的多个程
序的输入,然后监视这些程序以捕获某些输入上的“不同行为”,这样我们可能会在某些程序中发现错误.
对此,针对 ROS 所集成的各个功能包,本文提出了一种面向 ROS 的差分模糊测试方法:通过搭建差分模
糊测试的框架,对 ROS 所集成的各个功能包进行模糊测试,从而验证软件包内各项功能在实际应用中的准确
性.首先为 ROS 建立模糊测试框架,模糊器根据不同要求生成测试用例;接着,将差分测试的思想融入到框架
中,使用统一的测试用例文件作为模糊数输入,节点间实现通讯,执行测试;核心思想是不断为不同的通讯模
式生成测试用例,以便在执行结果之间找到尽可能多的不一致.最后,我们将该方法应用在机器人坐标转换的
实验中,对实现不同参考系下坐标转换的功能包 TF 和 TF2 进行测试.通过引导性模糊测试,成功地在实验过
程中触发了 3120 组用例的不一致执行输出并通过分析找出了触发这些不一致的原因.在本文中我们主要做
了以下贡献:
(1) 我们设计了一种面向 ROS 的差分模糊测试方法以有效的揭示 ROS 中不同版本功能包的差异和漏
洞;在该方法中介绍了用于 ROS 的差异信息的评估指标并设计了用于基础模块的相关算法;
(2) 我们使用该方法来测试 ROS 中影响意义广泛的功能包 TF 和 TF2,检测到许多不一致和安全问题;
通过分析原因判断出 TF 较 TF2 更为准确.
本文第 1 节介绍 ROS 和模糊测试相关的基础知识,为本文提到面向 ROS 的差分模糊测试方法的研究提
供理论基础.第 2 节对方法进行整体概述,介绍测试用例的生成方法、测试模块的执行以及评价指标的制定;
第 3 节是提出方法进的具体实现;第 4 节对该方法进行实验评估,将该方法应用在机器人坐标转换的实验中
进行评估并通过分析得出结果;第 5 节进行本文总结及对未来工作的展望.
1 背景知识
本节介绍 ROS 和模糊测试相关的基础知识,包括 ROS 的系统架构以及通讯机制和模糊测试的相关内容,
为本文提出的面向 ROS 的差分模糊测试方法提供理论基础.
1.1 ROS
ROS 是一个用于编写机器人软件的灵活框架,它集成了大量的工具、库、协议,提供了类似操作系统所
提供的功能,包括硬件抽象描述、底层驱动程序管理、共用功能的执行、程序间的消息传递、程序发行包管
理,可以极大简化繁杂多样的机器人平台下的复杂任务创建与稳定行为控制.
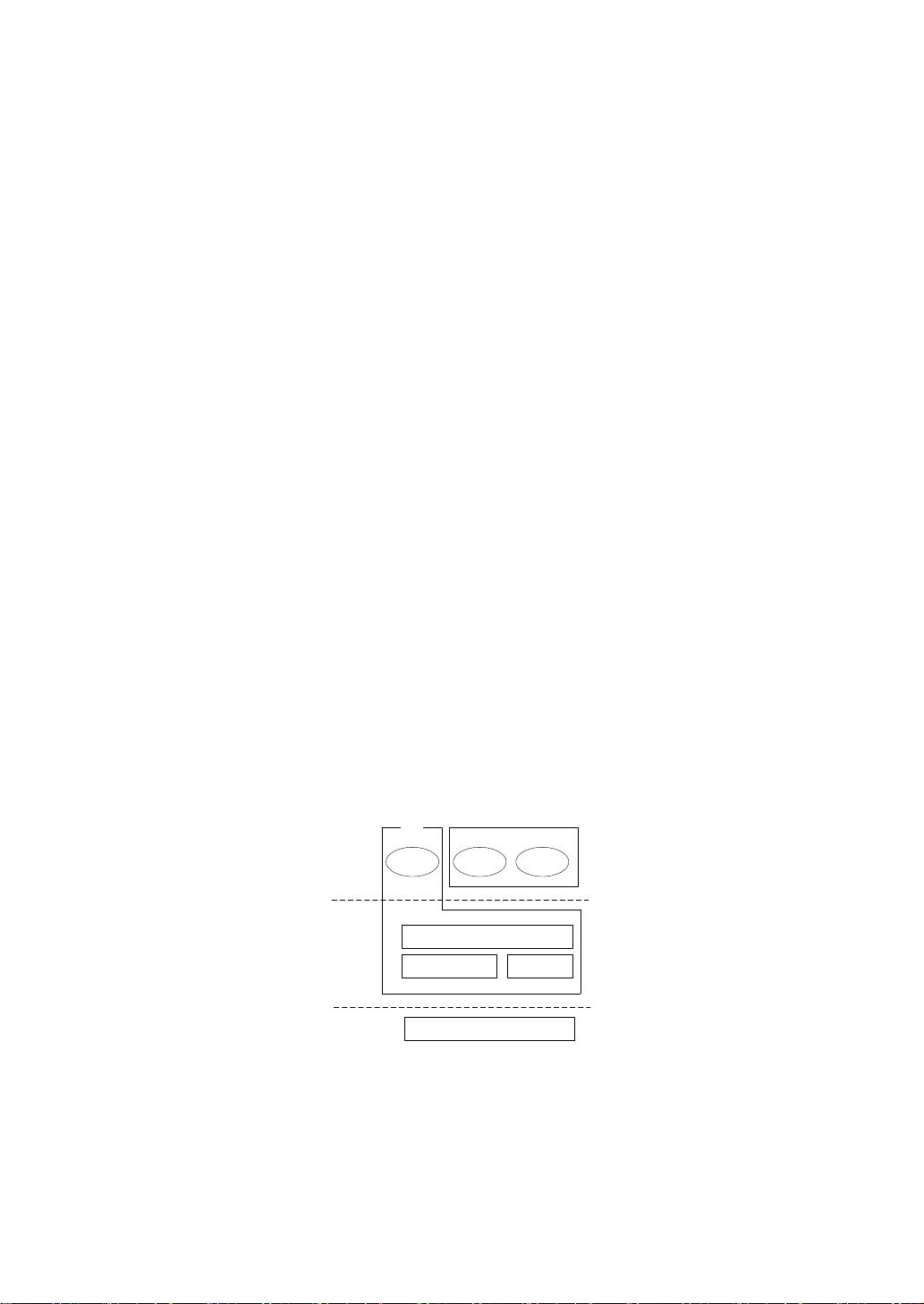
节点管
理器
节点 节点
客户端库
应用
应用层
TCPROS/UDPROS
Nodelet
进程
中间层
操作系统层
Linux
ROS1
Fig.1 ROS Architecture
图 1 ROS 系统架构
如图 1 所示,ROS 的系统架构设计分为三层:操作系统层、中间层、应用层.ROS 的操作系统层依托于
Linux 系统运行,它并不是一个传统意义上的操作系统,无法像 Windows、Linux 一样直接运行在计算机硬件
剩余14页未读,继续阅读
2021-08-13 上传
2013-02-27 上传
2012-04-05 上传
2022-08-04 上传
2014-12-15 上传
2021-05-05 上传

曹多鱼
- 粉丝: 29
- 资源: 314
 我的内容管理
展开
我的内容管理
展开







最新资源
- WordPress作为新闻管理面板的实现指南
- NPC_Generator:使用Ruby打造的游戏角色生成器
- MATLAB实现变邻域搜索算法源码解析
- 探索C++并行编程:使用INTEL TBB的项目实践
- 玫枫跟打器:网页版五笔打字工具,提升macOS打字效率
- 萨尔塔·阿萨尔·希塔斯:SATINDER项目解析
- 掌握变邻域搜索算法:MATLAB代码实践
- saaraansh: 简化法律文档,打破语言障碍的智能应用
- 探索牛角交友盲盒系统:PHP开源交友平台的新选择
- 探索Nullfactory-SSRSExtensions: 强化SQL Server报告服务
- Lotide:一套JavaScript实用工具库的深度解析
- 利用Aurelia 2脚手架搭建新项目的快速指南
- 变邻域搜索算法Matlab实现教程
- 实战指南:构建高效ES+Redis+MySQL架构解决方案
- GitHub Pages入门模板快速启动指南
- NeonClock遗产版:包名更迭与应用更新
