飞思卡尔全景360环视系统详细技术方案
"飞思卡尔 全景360环视 详细方案.pdf"
飞思卡尔全景360环视详细方案是NXP半导体提供的一种先进的车载视觉系统解决方案,旨在为汽车驾驶员提供全方位、无死角的视野,提升行车安全。该方案涵盖了多个独立的应用程序,并深入探讨了这些应用程序的软件理论,特别适用于基于Yocto项目的特定系统级芯片(SoC)的构建。
文档首先介绍了SurroundView应用的基本概念,解释了360度全景环视系统如何通过整合来自多个摄像头的图像,生成一个无缝拼接的鸟瞰视图。这一系统能够帮助驾驶员在停车、行驶在狭窄道路或进行复杂驾驶操作时,获得更清晰、全面的环境感知。
文档的第二部分详细阐述了如何从源代码构建各个应用程序,以适应特定的SoC,如i.MX8QM设备。这涉及到使用Yocto项目,这是一个开源Linux自动化构建系统,用于创建定制的嵌入式Linux发行版。通过Yocto,开发者可以轻松地针对不同硬件平台定制系统映像。
接下来,文档详述了系统校准设置的步骤和前期准备工作,这是确保360环视系统精确运行的关键。这包括摄像头的位置安装、角度校正以及自动校准功能的实现。系统校准API在文档的最后一部分被详细描述,它是整个SurroundView系统的核心组成部分。
为了便于开发者和有兴趣的用户理解系统功能,飞思卡尔还提供了一个开发套件。这个套件可以让用户自己搭建并测试全景环视系统。用户指南[1]提供了关于如何正确设置和运行开发套件的详细信息,特别是对于i.MX8QM设备的用户,它是一个强大的多核处理器,适合处理复杂的图像处理任务。
最后,NXP的SurroundView软件能力不仅仅是一个理论概念,而是可以通过实际的开发工具包进行演示验证。这个工具包利用了发布的硬件和软件资源,为用户提供了动手实践的机会,进一步增强了对系统的理解和应用。
飞思卡尔全景360环视详细方案提供了一个全面的框架,不仅涵盖了系统设计和技术实现,还包括了开发和调试的实用指导,是汽车电子行业开发全景环视系统的重要参考资料。
System calibration arrangement
Surround View Application, Reference Manual, Rev. 1, 07/2018
NXP Semiconductors 7
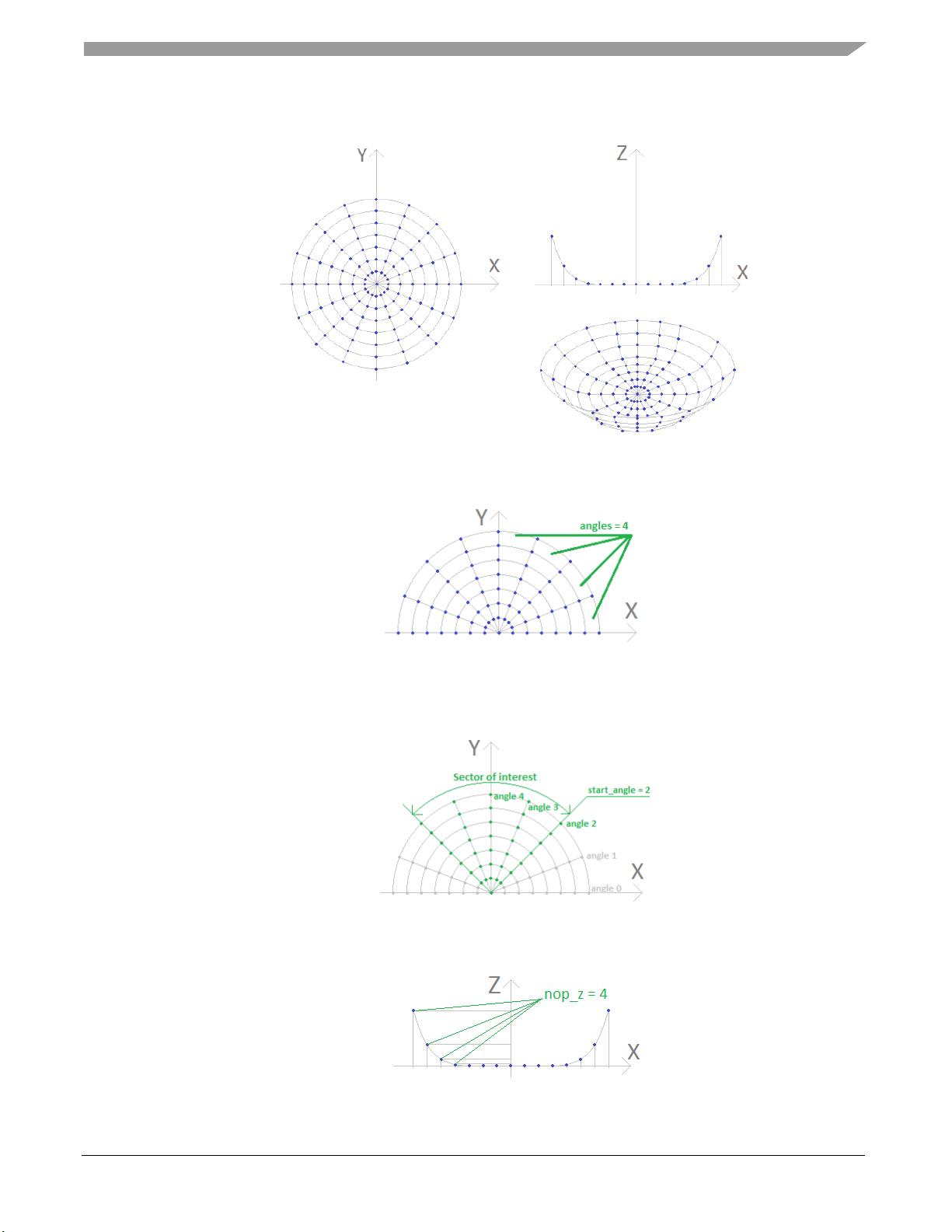
• <grid>
Figure 6. Grid definition
— <angles>—every quadrant of the circle is divided into this number of arcs.
Figure 7. Angles definition
— <start_angle>—it is not necessary to define the grid through a whole semi-circle. The
<start_angle> sets the circle sector for which the grid is generated.
Figure 8. Start angle definition
— <nop_z>—the number of points in the z-axis.
Figure 9. z-axis granularity definition
剩余34页未读,继续阅读
2021-05-31 上传
点击了解资源详情
2011-11-13 上传
2012-10-17 上传
2021-08-29 上传
2021-08-29 上传









