航天应用中单侧矩阵转换器驱动的无刷直流电机技术
需积分: 10 196 浏览量
更新于2024-09-10
收藏 2.25MB PDF 举报
本文档深入探讨了航空航天领域中无刷直流电机(BLDC Motor)的一种创新驱动技术——单侧矩阵转换器(Single-Sided Matrix Converter, SSMC)。自20世纪70年代以来,随着"全电动飞机"和"更电动飞机"(MEA)概念的提出,对电动系统的依赖性日益增强,这促使了对高效、可靠和低维护成本电力解决方案的需求。矩阵转换器作为一种多相功率电子设备,特别适用于这类应用,因为它能够实现高性能转换,并且在没有微处理器的情况下也能驱动BLDC电机。
在传统的BLDC驱动系统中,通常需要复杂的控制逻辑来管理电机性能。然而,这篇论文介绍的单侧矩阵转换器驱动系统采用了一种简化的方法,即利用简单的滞回电流控制策略来控制电机扭矩。这种设计的一大优势在于其免去了微处理器,降低了系统复杂性和故障风险,提高了系统的可靠性与容错能力。
矩阵转换器的多相结构使得它能有效地分配和转换电能,即使部分器件出现故障,整体系统仍能保持部分运行,提高了整个电气系统的可用性。然而,多相设计也意味着需要更多的功率元件,这可能增加了系统的成本和尺寸。为了验证这种新型驱动技术的实际效能,研究者们开发了一个五相SSMC原型,并通过实验展示了驱动性能。
具体来说,该驱动系统应用于电液伺服系统(Electro-Hydrostatic Actuation, EHA)中,这是航空航天行业中常见的用于精确控制和定位的关键组件。通过使用SSMC,电液伺服系统的响应速度和精度得到了显著提升,同时减少了对传统机械部件的依赖,从而推动了未来航空电子系统的轻量化和高效化。
这篇论文不仅介绍了单侧矩阵转换器驱动技术的基本原理和设计,还展示了其实现的创新性和在特定应用中的潜在优势。它对于推进航空航天领域的绿色和智能电力系统发展具有重要意义,值得相关行业的专业人士深入研究和关注。
3544 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 59, NO. 9, SEPTEMBER 2012
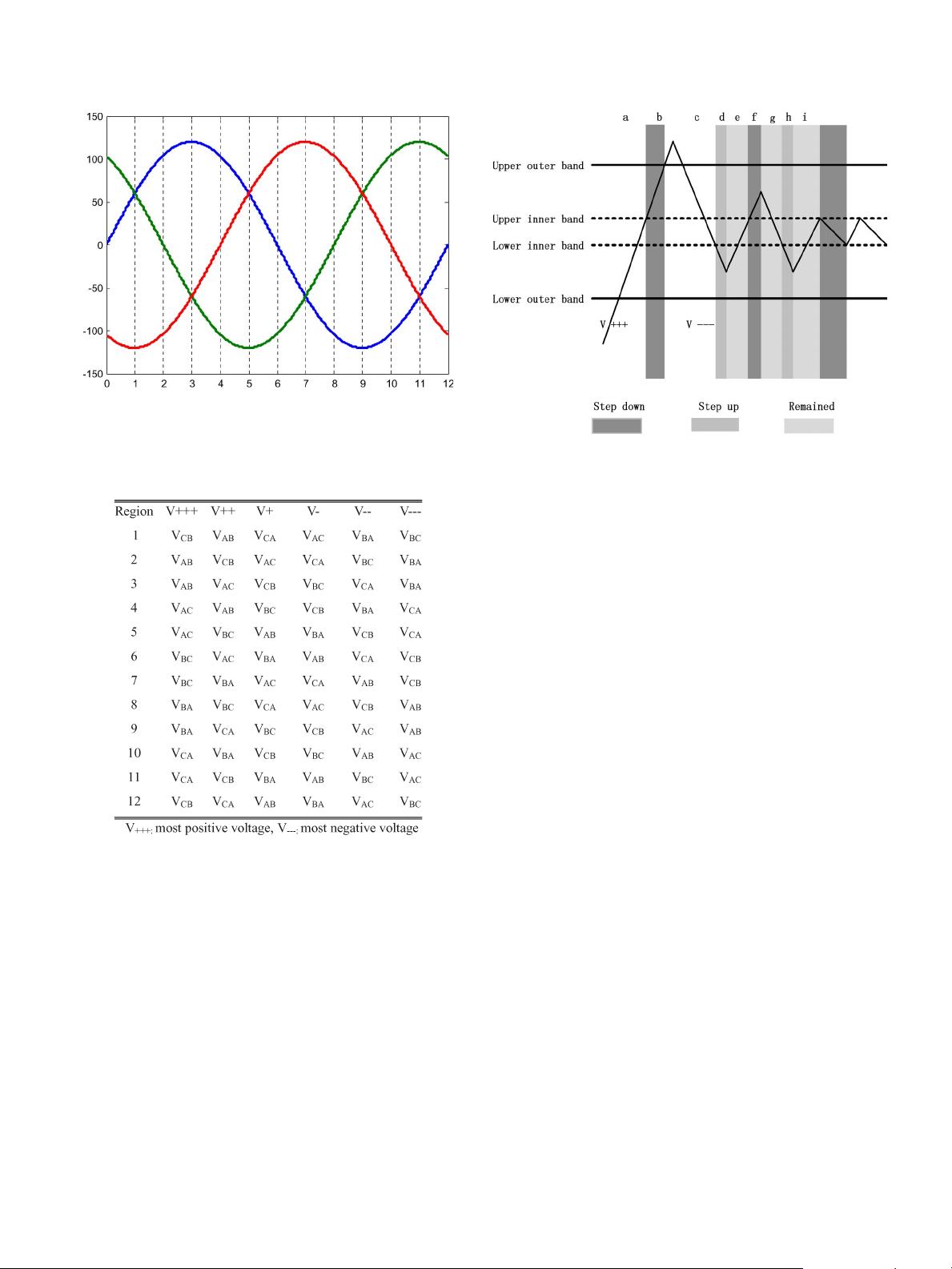
Fig. 3. Twelve regions of three-phase voltage supply.
TAB LE I
S
EVEN-LEVEL VOLTAGES.(V +++)MOST POSITIVE VOLTAGE.
(V −−−)M
OST NEGATIVE VOLTAGE
B. DB Hysteresis Control
Double-band (DB) control is more complicated and intelli-
gent, although it is based on the same principle as SB control. It
uses both inner and outer hysteresis bands to control the output
current. The supply voltages can be divided into 12 regions
(1–12) based on the points at which the phase voltages cross
each other and cross zero, as shown in Fig. 3.
In each region, the supply voltage needs to be identified as
seven levels depending on their relative magnitudes, as listed
in Table I, in order to control its current. These are defined as
V +++, V ++, V +,0,V −, V −−, and V −−− which
represent the most positive to the most negative voltages.
When the current is below the lower outer band, the V +++
voltage is applied (area a), as shown in Fig. 4. The current
begins to increase. When the current reaches the upper inner
band, the applied voltage level begins stepping down until a
change in direction of current is observed. If the current rises
above the upper outer band before the current begins to reduce
Fig. 4. DB control.
(area c), the V −−− voltage is automatically applied and
would be held constant until the current drops below the lower
inner band. If the current rises above the upper inner band but
below the upper outer band when the current begins to reduce,
at this point, the applied voltage level is held constant until the
current drops below the lower inner band (area g). Then, the
voltage level applied is stepped up until the direction of change
of current becomes positive (areas d and h). The voltage applied
when the current begins to increase will be held until the current
reaches the upper inner band (areas e and i) which is back to the
previous state at the beginning of the paragraph.
IV. M
ULTIPHASE DESIGN
A three-phase drive, the most common topology for indus-
trial drives, cannot achieve the aerospace requirements in terms
of safety and reliability for this application which instead can be
fulfilled by a multiphase motor-drive design [18]–[20]. There
are many possible configurations for the power converter and
the number of motor phases. The three-, four-, five- and six-
phase BLDC motor drives fed by an SSMC will be compared
in this paper.
A basic unit of the SSMC is shown in Fig. 2. It can be seen
that only unidirectional load current is possible. Each phase
winding will be connected to one unit of the SSMC. A total
of three units is required for a three-phase drive.
When an even number of phases is used, an alternative to
the individually driven motor phase method is available for
the SSMC drive. By connecting the motor phases to create a
neutral point, two phases can be connected to one SSMC unit,
and therefore, only half of the power devices are required but
with reduced fault tolerance. For odd number of phases, the
neutral point can only be connected when bidirectional current
is available; therefore, it cannot be applied with SSMC.
The performance of the multiphase drives is investigated.
Simulations were carried out using Matlab and finite-element
method software. The average torque and the torque ripple for
the phase numbers considered are shown in Table II.
剩余10页未读,继续阅读
145 浏览量
2018-12-04 上传
2021-02-21 上传
2021-05-09 上传
2021-05-03 上传
2021-10-01 上传
2019-04-24 上传


SOBOLEV1908
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- WordPress作为新闻管理面板的实现指南
- NPC_Generator:使用Ruby打造的游戏角色生成器
- MATLAB实现变邻域搜索算法源码解析
- 探索C++并行编程:使用INTEL TBB的项目实践
- 玫枫跟打器:网页版五笔打字工具,提升macOS打字效率
- 萨尔塔·阿萨尔·希塔斯:SATINDER项目解析
- 掌握变邻域搜索算法:MATLAB代码实践
- saaraansh: 简化法律文档,打破语言障碍的智能应用
- 探索牛角交友盲盒系统:PHP开源交友平台的新选择
- 探索Nullfactory-SSRSExtensions: 强化SQL Server报告服务
- Lotide:一套JavaScript实用工具库的深度解析
- 利用Aurelia 2脚手架搭建新项目的快速指南
- 变邻域搜索算法Matlab实现教程
- 实战指南:构建高效ES+Redis+MySQL架构解决方案
- GitHub Pages入门模板快速启动指南
- NeonClock遗产版:包名更迭与应用更新
