电机FOC控制详解:坐标变换与C语言实现
需积分: 50 118 浏览量
更新于2024-08-31
收藏 228KB DOCX 举报
"电机FOC中的坐标变换涉及关键步骤,包括CLARK变换和PARK变换,用于将三相交流电机的电流从原始的a、b、c相坐标系转换为直流等效的d、q坐标系,以实现更精确的磁场定向控制。CLARK变换将三相电流转换为两相静止的α、β坐标系,而PARK变换则进一步将α、β坐标系转换为旋转的d、q坐标系,与电机的磁场同步。在等幅值转换中,K取1,转换后各相电流幅值保持不变;在等功率转换中,K取√3/2,确保功率守恒。MATLAB/SIMULINK的仿真模型展示了这两种变换的过程和结果,对于理解和验证坐标变换的正确性具有重要意义。在实际应用中,等幅值变换通常用于避免过调制问题。PARK变换的矩阵表达式中,夹角θ代表d轴与α轴的夹角,确保了转换的准确性。"
电机控制领域的磁场定向控制(FOC)是一种先进的调速方法,它利用坐标变换来改善电机性能。FOC控制策略的核心是SVPWM、坐标变换、信号采集反馈以及PID闭环控制,其中坐标变换是连接电气和机械量的关键桥梁。
CLARK变换,也称为克拉克变换,将三相交流电流a、b、c转换为两相静止的α、β坐标系。该变换通过一个简单的线性矩阵完成,使得三相电流可以被直观地理解为在直轴和交轴上的分量。CLARK变换的逆变换则用于将α、β坐标系的电流转换回a、b、c相。转换系数K的选择可以根据需要进行调整,K=1对应等幅值转换,K=√3/2对应等功率转换。
PARK变换,又称帕克变换,是电机控制中另一个重要的步骤。它将静止的α、β坐标系进一步转换为旋转的d、q坐标系,其中d轴与电机的磁链方向对齐,q轴则与转速同步。这一变换使得电机的交流性质可以转化为直流性质,便于实现磁场定向和PID控制。PARK变换的矩阵包含了角度θ,该角度代表电机的磁场角度,确保了坐标系与电机实际状态的一致性。
MATLAB/SIMULINK的仿真模型是验证这些理论的重要工具,通过建立abcToAlphabeta和alphabetaToABC模块,可以直观地观察不同变换的效果,如等幅值变换和等功率变换下的电流波形。等幅值变换通常在实际应用中更为常见,因为它避免了过调制问题,保证了SVPWM的效率和稳定性。
电机FOC中的坐标变换是实现精确电机控制的基础,它将复杂的三相交流系统简化为易于控制的直流系统,为优化电机性能提供了可能。通过深入理解并应用CLARK和PARK变换,工程师可以设计出更高效、更稳定的电机控制系统。
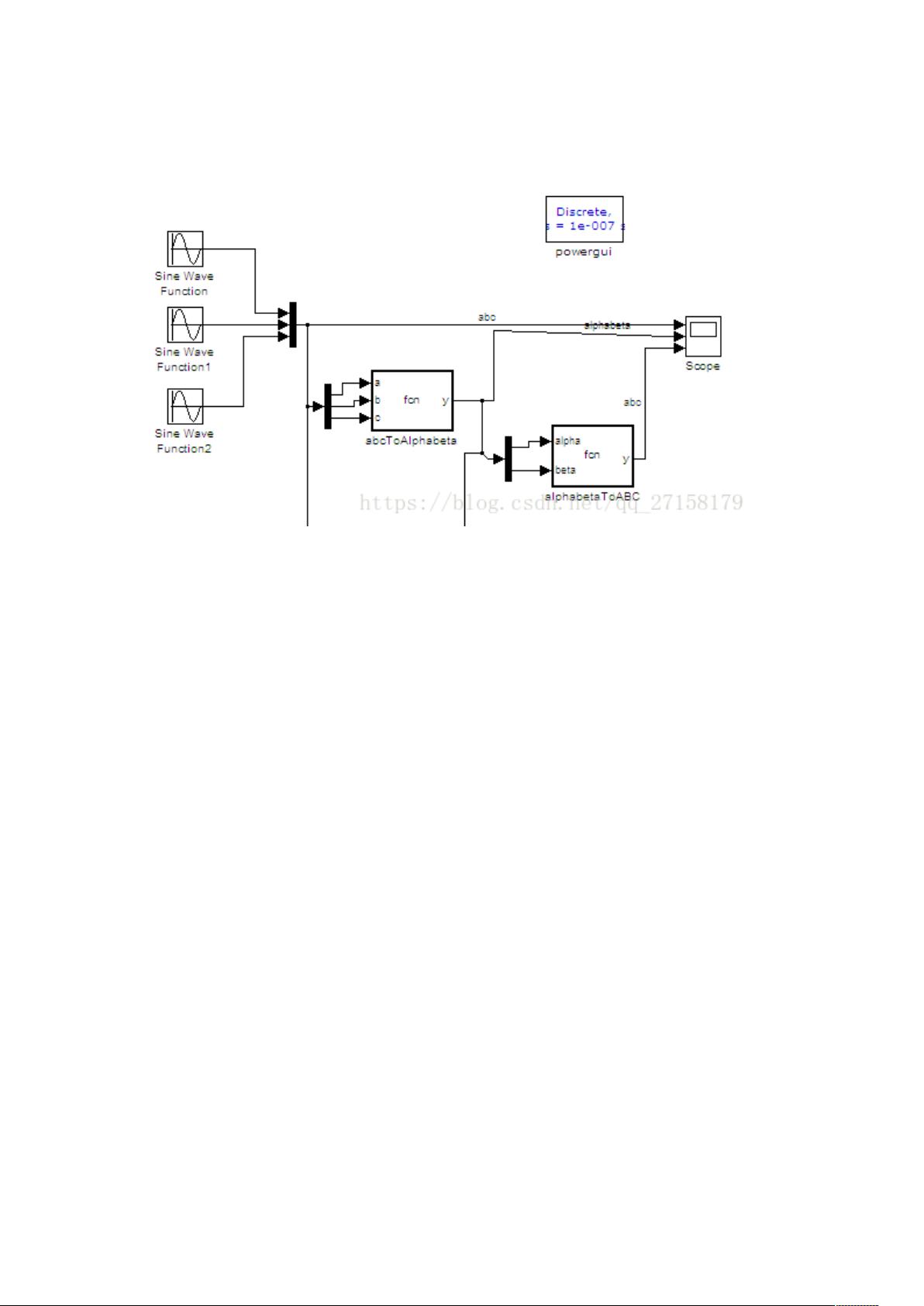
在 matlab/simulink 中搭建仿真模型:
*
abcToAlphabeta 中的代码:
1. function y = fcn(a,b,c)
2. %#eml
3.
4.
5. alpha = a - b/2 - c/2;
6. beta = sqrt(3)/2 * (b - c);
7. y = (2/3)*[alpha;beta];
alphabetaToABC 中的代码:
1. function y = fcn(alpha,beta)
2. %#eml
3.
4. a = alpha;
5. b = -1/2 * alpha + sqrt(3)/2 * beta;
6. c = -1/2 * alpha - sqrt(3)/2 * beta;
7.
8. y = [a;b;c];
仿真波形:
剩余12页未读,继续阅读
2024-09-11 上传
点击了解资源详情
2017-11-30 上传
点击了解资源详情
2023-04-27 上传
2021-09-29 上传
130 浏览量

梅川梦子
- 粉丝: 0
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- ITE Embedded Controller
- 2009年3月二级VF真题
- MAPGIS7.0二次开发教程入门篇
- Introduction to the IP Multimedia Subsystem
- MAPGIS7.0二次开发教程基础篇
- QTP自动化测试指导(中文官方文档)
- 09年3月二级C语言真题及答案
- Ubuntu linux 命令大全 Ubuntu技巧.txt
- Beej's Socket网络编程指南.pdf
- TCP/IP 标准6
- jsp第一阶段试卷,涉及JSP语法,内置对象及HTML编程
- PowerCenter服务器配置手记
- GNU make中文手册
- RFC-3261官方中文版
- VIM用户手册中文版
- FTP建站与配置完全手册详解之高级设置
