
The Structure of the ARMulator
6 Copyright © 2003 ARM Limited. All rights reserved. Application Note 32
ARM DAI 0032F
2 The Structure of the ARMulator
The ARMulator comprises several parts:
• a model of the ARM processor core and cache (if used)
• peripheral models that communicate with the base memory model and may be
enabled or disabled via configuration files
• an operating system interface to provide an execution environment.
By modifying or rewriting the supplied models, you can model almost any ARM system
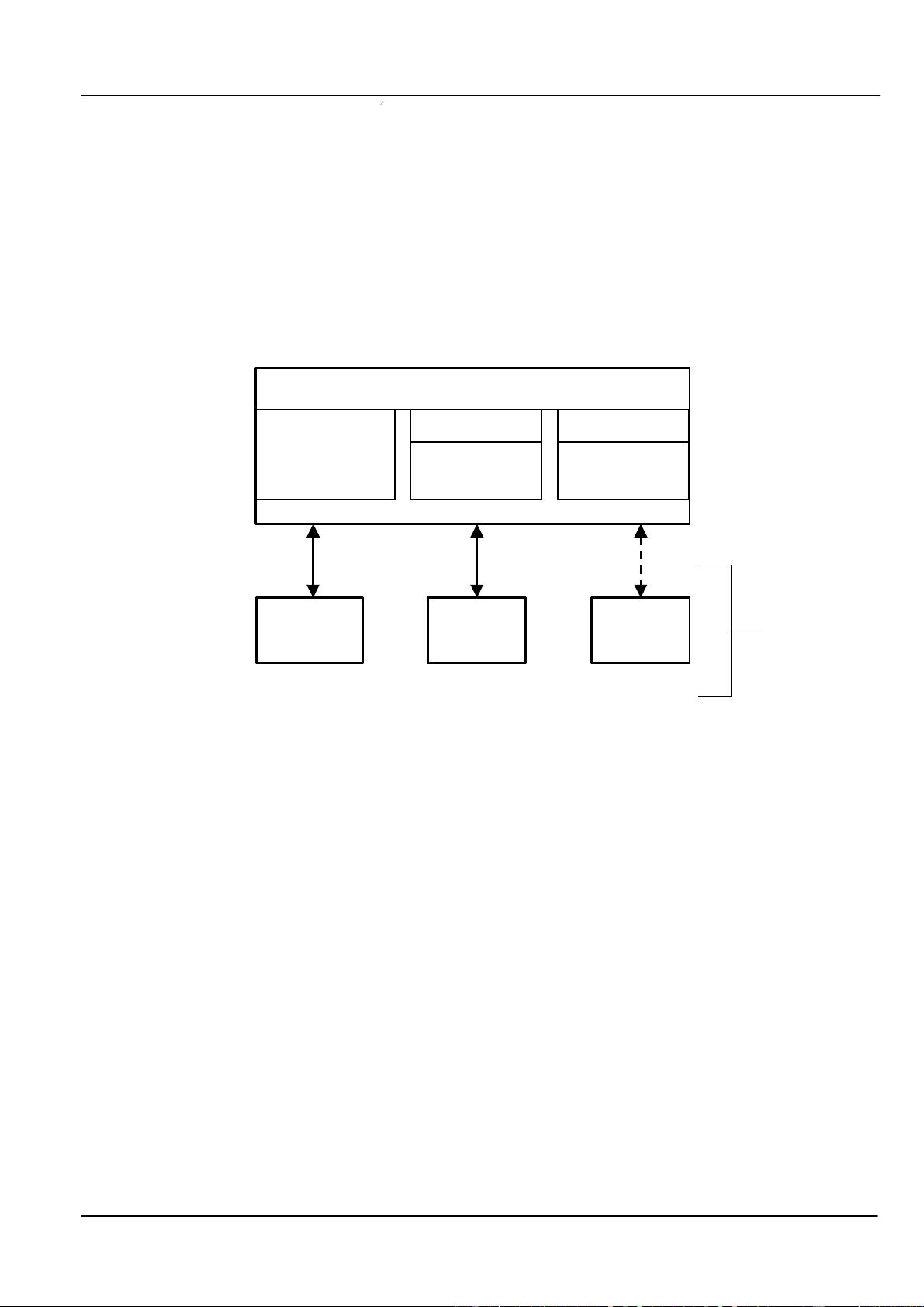
and use it to debug code. The following diagram illustrates this structure.
ARMULATE.SDI
ARM7 & ARM9
Core Model
(+ Cache)
ARMISS.SDI v6 ARMISS.SDI
ARM10 + XScale
+ Cache
Architecture v6
Interrupt
Controller
Timer (Others)
Peripheral
Models
Peripherals are registered by calling the functions ARMulif_ReadBusRange and
bus_registerPeripFunc during model initialisation. This is explained fully with an
example in section 4.2 Explanation (Parallel Port Model). Address settings may either be
hard-coded or loaded in from a configuration (.ami or .dsc) file prior to registration. The
user provides:
• a base address at which the peripheral is located
• the number of bytes which are covered by the peripheral model.
It is possible to have gaps within this range which are not decoded by a peripheral.
In the diagram above, ARMULATE.SDI represents the main ARMulator component. Below
this resides a model of the core being emulated along with any cache if it has been
configured. At the lowest level is a flat memory model (with the full 32 bit, 4GB range
accessible) and the peripheral decoder. Prior to ADS 1.2, the decoder and flat memory
model were integral to the ARMulator and could not be modified. However, this is not the
case in ADS 1.2 and RV ARMulator ISS.
2.1 The ARM processor core model
The ARM processor core model handles all communication with the debugger. This part
of the ARMulator is not customizable.
剩余29页未读,继续阅读

「已注销」
- 粉丝: 17
- 资源: 10
 我的内容管理
展开
我的内容管理
展开







最新资源
- 李兴华Java基础教程:从入门到精通
- U盘与硬盘启动安装教程:从菜鸟到专家
- C++面试宝典:动态内存管理与继承解析
- C++ STL源码深度解析:专家级剖析与关键技术
- C/C++调用DOS命令实战指南
- 神经网络补偿的多传感器航迹融合技术
- GIS中的大地坐标系与椭球体解析
- 海思Hi3515 H.264编解码处理器用户手册
- Oracle基础练习题与解答
- 谷歌地球3D建筑筛选新流程详解
- CFO与CIO携手:数据管理与企业增值的战略
- Eclipse IDE基础教程:从入门到精通
- Shell脚本专家宝典:全面学习与资源指南
- Tomcat安装指南:附带JDK配置步骤
- NA3003A电子水准仪数据格式解析与转换研究
- 自动化专业英语词汇精华:必备术语集锦
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


