机器人路径规划与避障算法详解
需积分: 35 136 浏览量
更新于2024-07-19
11
收藏 8.69MB PDF 举报
"路径规划与避障算法经典讲义,源自浙江大学机器人技术课程,涵盖了可视图法、人工势场法、A*算法、Bug算法、VFH和DWA等路径规划与避障策略,是学习规划算法的良好参考资料。"
本文档主要介绍了机器人技术中的路径规划与避障算法,涉及了自主移动机器人在未知或已知环境中的关键问题和一般软件体系结构。首先,自主移动的三个核心问题被提出:自定位、目标规划和导航规划。这些问题在机器人技术中至关重要,因为它们决定了机器人如何理解自身位置、设定目的地以及如何有效地到达那里。
环境地图是机器人自主导航的基础,可以是预先构建的,也可以通过感知和分析环境来实时创建。机器人需要具备感知环境的能力,包括定位自己在地图中的位置,以及规划和执行移动。这一过程通常涉及一套复杂的软件系统,包括信息处理、感知、运动控制、执行和测量数据的交互。
在路径规划方面,文档提到了路径导航和自主导航两种方式。路径导航依赖于预设的标志或信号,虽然简单但限制了机器人的自由度和适应性,且不易应对变化的环境。相比之下,自主导航更加复杂,它需要综合考虑地图信息、目标位置以及实时传感器数据,进行路径规划和避障。
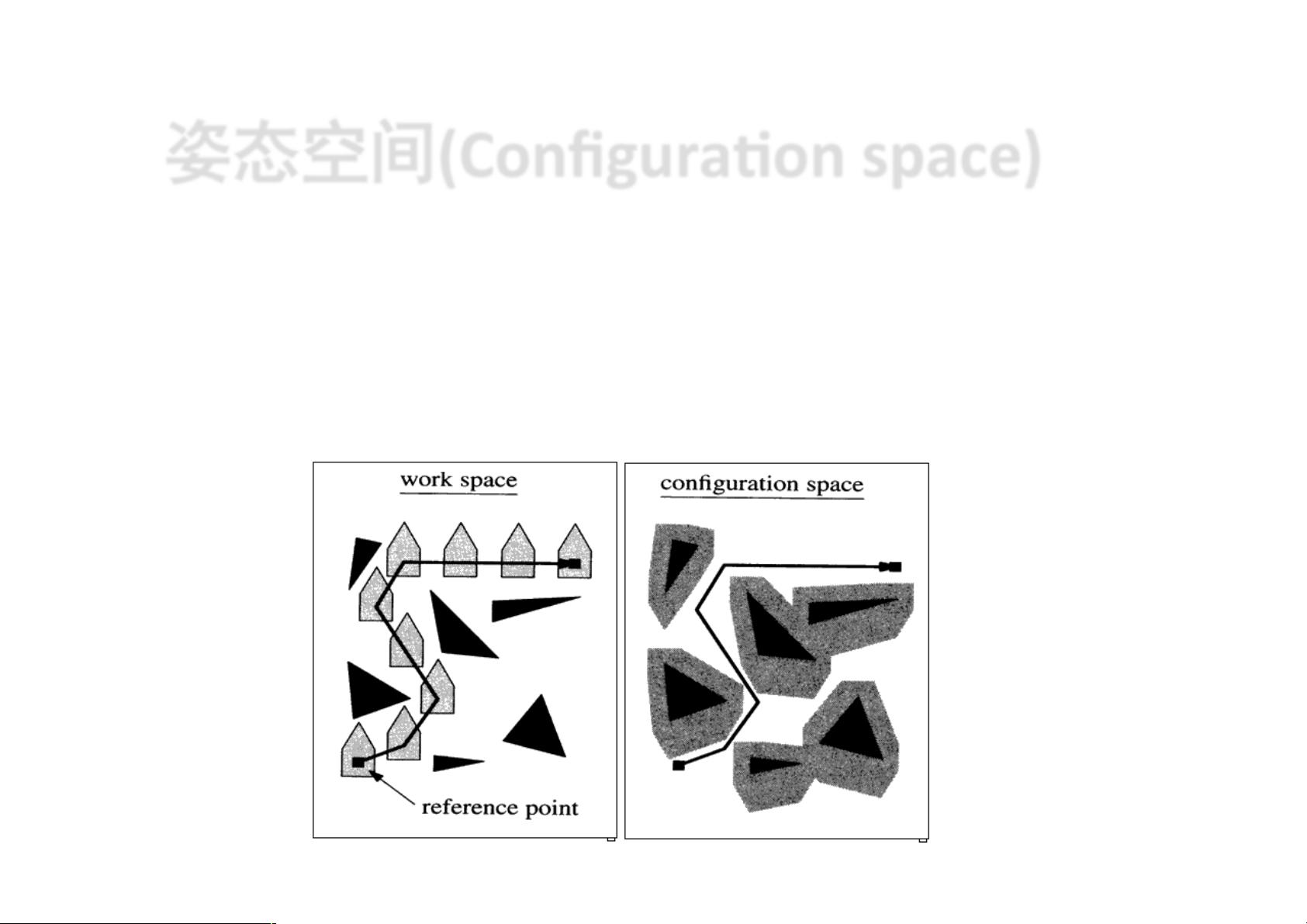
避障是自主导航的重要组成部分,主要涉及路径规划和轨迹生成。路径规划是规划一条从起点到终点的无碰撞路径,而避障则是根据传感器反馈动态调整路径,以防止机器人与障碍物发生碰撞。这部分介绍了多种算法,如可视图法用于快速生成可达区域,人工势场法模拟物理场引导机器人避开障碍,A*算法是一种高效的搜索算法,Bug算法则用于简单路径跟踪,VFH(Vector Field Histogram)用于避障决策,DWA(Dynamic Window Approach)则考虑了机器人的动态约束来优化路径。
面向长期目标的战略规划,例如在复杂环境中寻找最短或最优路径,也是路径规划研究的一部分。这些算法和技术的应用广泛,不仅限于服务机器人、无人驾驶汽车,还涉及到无人机、水下机器人等领域。
这份讲义深入浅出地介绍了路径规划与避障的基本概念、方法和算法,对于初学者和专业人士都是一个宝贵的资源,能够帮助他们理解和掌握机器人自主导航的关键技术。

6191 浏览量
1120 浏览量
950 浏览量
1321 浏览量
1068 浏览量
2443 浏览量
402 浏览量

ghy2013
- 粉丝: 2
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- navindoor-code:室内定位算法设计框架。 模拟接入点信号和惯性信号。-matlab开发
- holbertonschool-web_back_end
- vue3-音乐
- Android6Data1.zip
- quadquizaminos:一种带有诸如测验问题的tretrominoes游戏,以获取战利品盒来帮助游戏。 这是Grox.io对四块的扩展
- 行业-2021年轻代厨房小家电洞察报告.rar
- recipes::file_folder:纤维示例
- .Net 4.6.2安装失败指导
- ServerGraphQL
- 等级保护2.0-测评指导书.zip
- SimpleDynamo:Amazon DynamoDB 的原型
- P2P
- 城市建筑网站模板
- sfkios.com:资产SFKIOS
- Aquatic-Surface-Vehicles-Simulator_Dev:开发OPAQS项目
- 行业-港股 哔哩哔哩招股说明书.rar
