"基于LQR控制的二级倒立摆系统研究与优化"
版权申诉
84 浏览量
更新于2024-02-25
收藏 1.72MB DOCX 举报
ng coupling and fast motion. It is an ideal model to test the effectiveness of various new control theories and methods. During the control process, it can effectively reflect many key issues such as stability, robustness, agility, and tracking. This paper mainly focuses on the LQR control method for a double inverted pendulum.
Firstly, the mathematical model of the double inverted pendulum is established. Then, the control design for the mathematical model of the double inverted pendulum is conducted. Genetic algorithm is applied to determine the weighting matrices Q and R in the performance index function of the system, obtaining the state feedback control matrix. MATLAB is used for system simulation. After several attempts with different values for the Q matrix, the response of the system was not satisfactory. Therefore, genetic algorithm is used to optimize the Q matrix. Simulation results prove that the system response after genetic algorithm optimization can better meet the design requirements.
Finally, experiments are conducted on the test bench to validate the results obtained from MATLAB simulation. The results from the experiment confirm the findings from the simulation.
In conclusion, the research on the double inverted pendulum using LQR control method with genetic algorithm optimization shows promising results in improving the system response to meet the design requirements. The study provides insights into the control of complex and unstable systems like the double inverted pendulum, and the combination of LQR control method with genetic algorithm optimization proves to be effective in enhancing the system performance.
实用标准
度产生影响;而并联倒立摆系统每个摆杆的状态变化不受其他摆杆状态变化的影响,
只与水平连杆的角速度及角加速度有关。
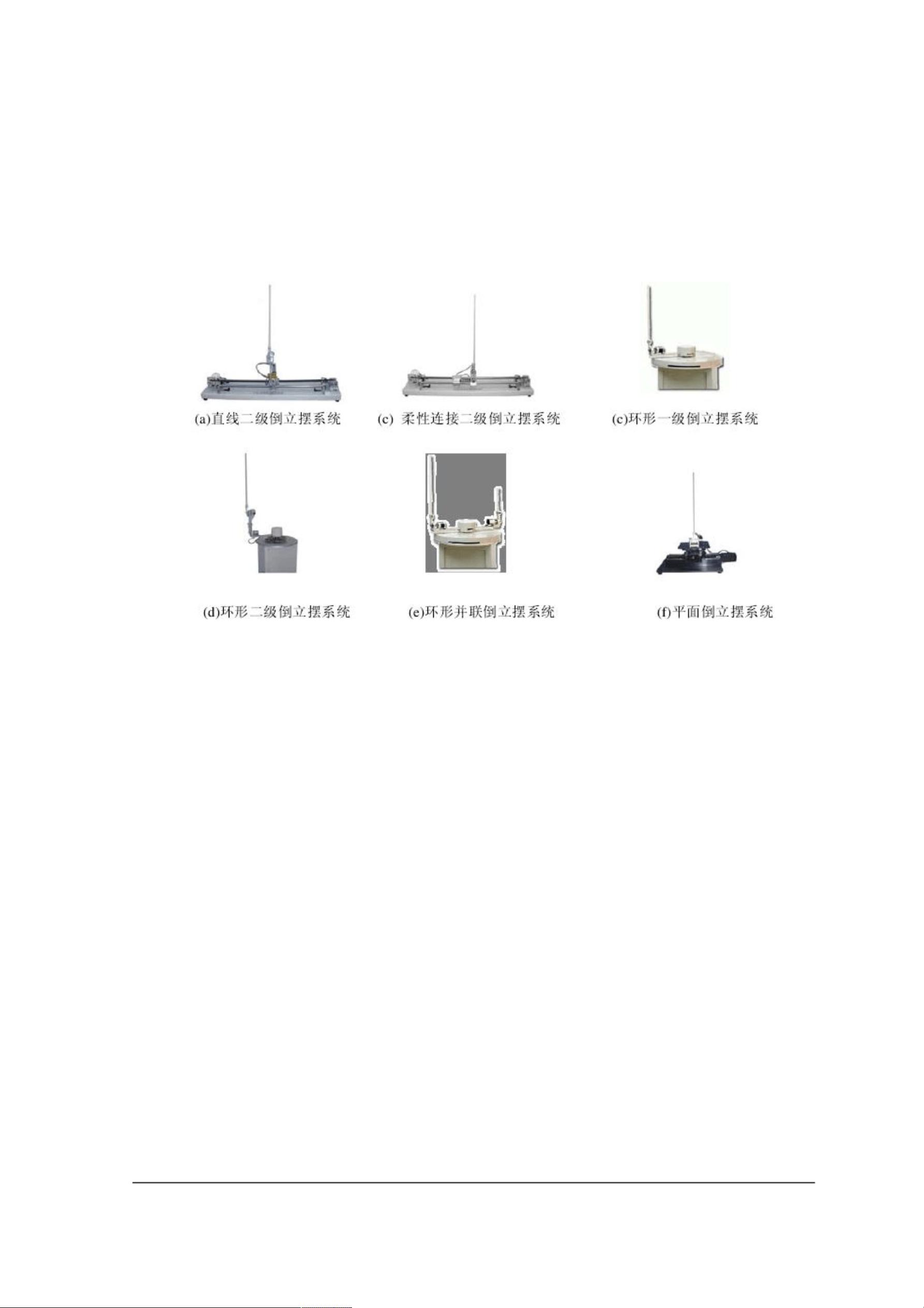
几种不同类型的倒立摆系统实物如图 1.1 所示。
图 1.1 各类倒立摆系统
当人用手托起一根立起的竹竿时,他会通过手臂的不断移动来保持平衡,使竹竿
不倒。假如两根竹竿上下在一起(自由连接),还能长时间保持稳定直立么?通过实
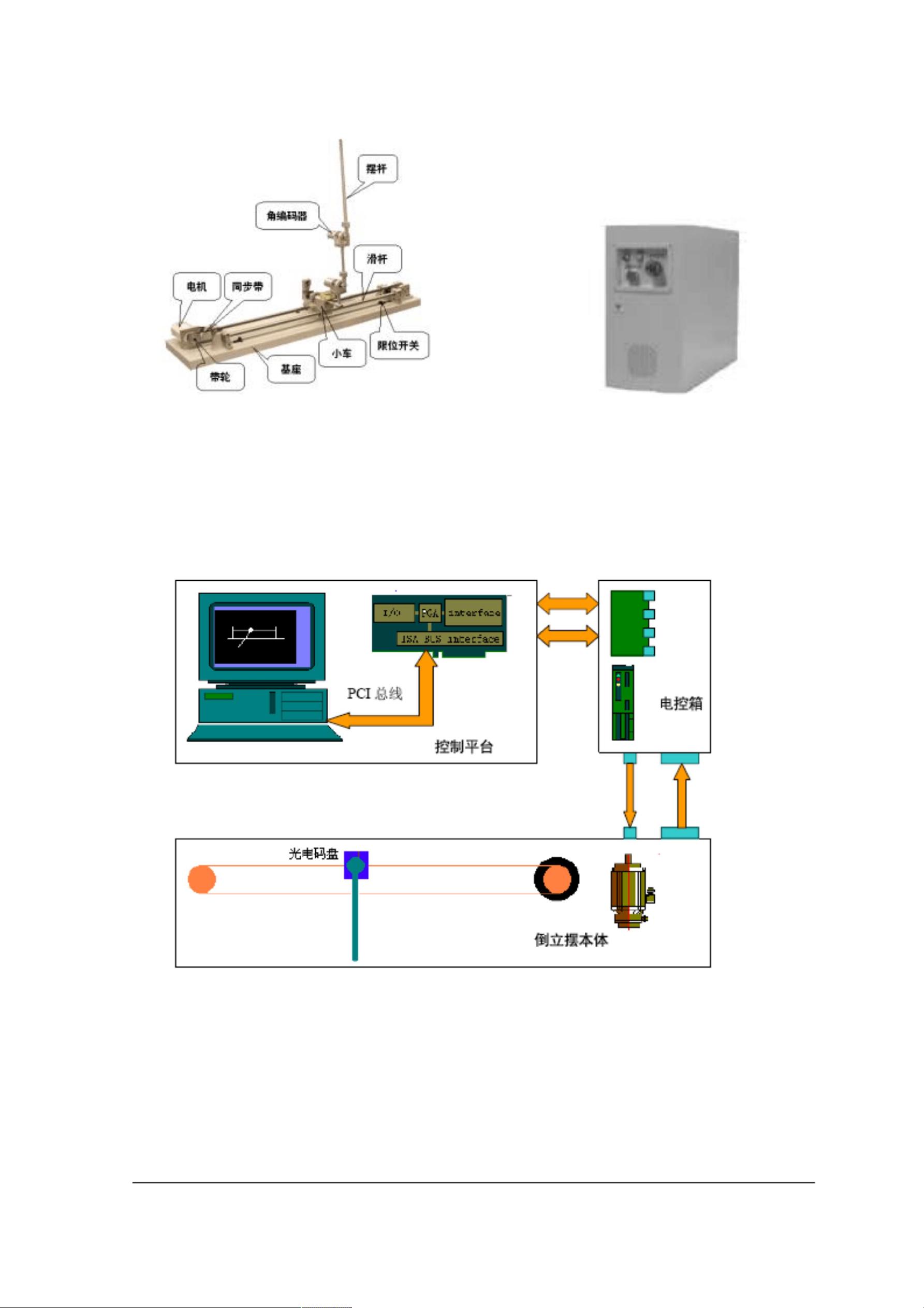
验仪器将这样的两根棍在自由连接状态下立起来,最下边的一根棍与滑轨上的一个小
车自由连接。通过小车在滑轨上左右移动来保持两根棍上下立在一起不倒。从科学的
角度讲,这就叫二级倒立摆。二级倒立摆装置如图1.2 所示:
精彩文档

剩余52页未读,继续阅读
2022-07-08 上传
2022-07-08 上传
2022-07-08 上传
2022-07-08 上传
2022-06-29 上传
2019-12-18 上传
2022-07-08 上传
2022-07-10 上传

G11176593
- 粉丝: 6871
- 资源: 3万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
