机器人避障:最短路径与最短时间模型探究
版权申诉
"本文主要探讨了机器人在平面区域内避障行走的问题,重点在于寻找最短路径和最短时间路径的数学模型。文章提出了线圆结构的概念,并将其分解为三种情况来解决复杂路径。通过非线性规划模型和LINGO软件,分别计算出四种不同的最短路径和最短时间路径。此外,文章还描述了12个不同形状的障碍物的特征,为机器人避障提供了具体的场景设定。"
在这篇文档中,主要讨论的是机器人在平面环境中的避障策略,尤其是在不能进行折线拐弯的条件下。问题的核心在于如何构建数学模型来寻找从起点到目标点的最短路径和最小时间路径。首先,文章提出了一个称为“线圆结构”的概念,即路径由直线段和圆弧组成,以此来规避障碍物。通过对路径的细分,将复杂路径转化为简单线圆结构的组合,这包括三种不同类型的线圆结构。
在问题一中,作者采用了“铺障避其较小部分而取之”的策略,寻找最短路径。通过初等模型和非线性规划模型,确定了四种不同的最短路径长度,分别是471.0372、881.3038和1115.2。这些路径长度是基于机器人通过特定点(如A、B、C)时,圆弧与切线段的总和。对于更复杂的情况,如(O-A-B-C-O)的路径,由于圆心位置的不确定性,采用非线性规划模型和LINGO软件优化求解,得到了最短路径长度为2702.4。
问题二则进一步考虑了机器人行走的最短时间,这是在问题一的基础上,通过扩大转弯圆弧的半径,因为半径越大,机器人转弯的速度可以更快。固定圆心在正方形5的左顶点,改变半径,建立以时间最短为目标的非线性规划模型,最终使用LINGO软件求得最短时间路径所需时间为97.45735秒。
关键词:避障问题、线圆结构、最短路径、最短时间路径、非线性规划。这些问题的解决依赖于对平面区域的详细描述,其中包括12个不同形状的障碍物,例如正方形、圆形、平行四边形、三角形和长方形等,这些障碍物的几何特性为实际的机器人避障算法设计提供了基础数据。
三、模型假设
1、假设机器人可以看成是质点。
2、假设机器人在行走过程中,不会出现任何故障,并能平稳的沿着直线和
圆弧行走。
四、模型建立
1、首先证明一个猜想[4]:
猜想一:具有圆形限定区域的最短路径是由两部分组成的:一部分是平面上
的自然最短路径(即直线段),另一部分是限定区域的部分边界,这两部分是相
切的,互相连接的。(即问题分析中的拉绳子拉到最紧时的状况)
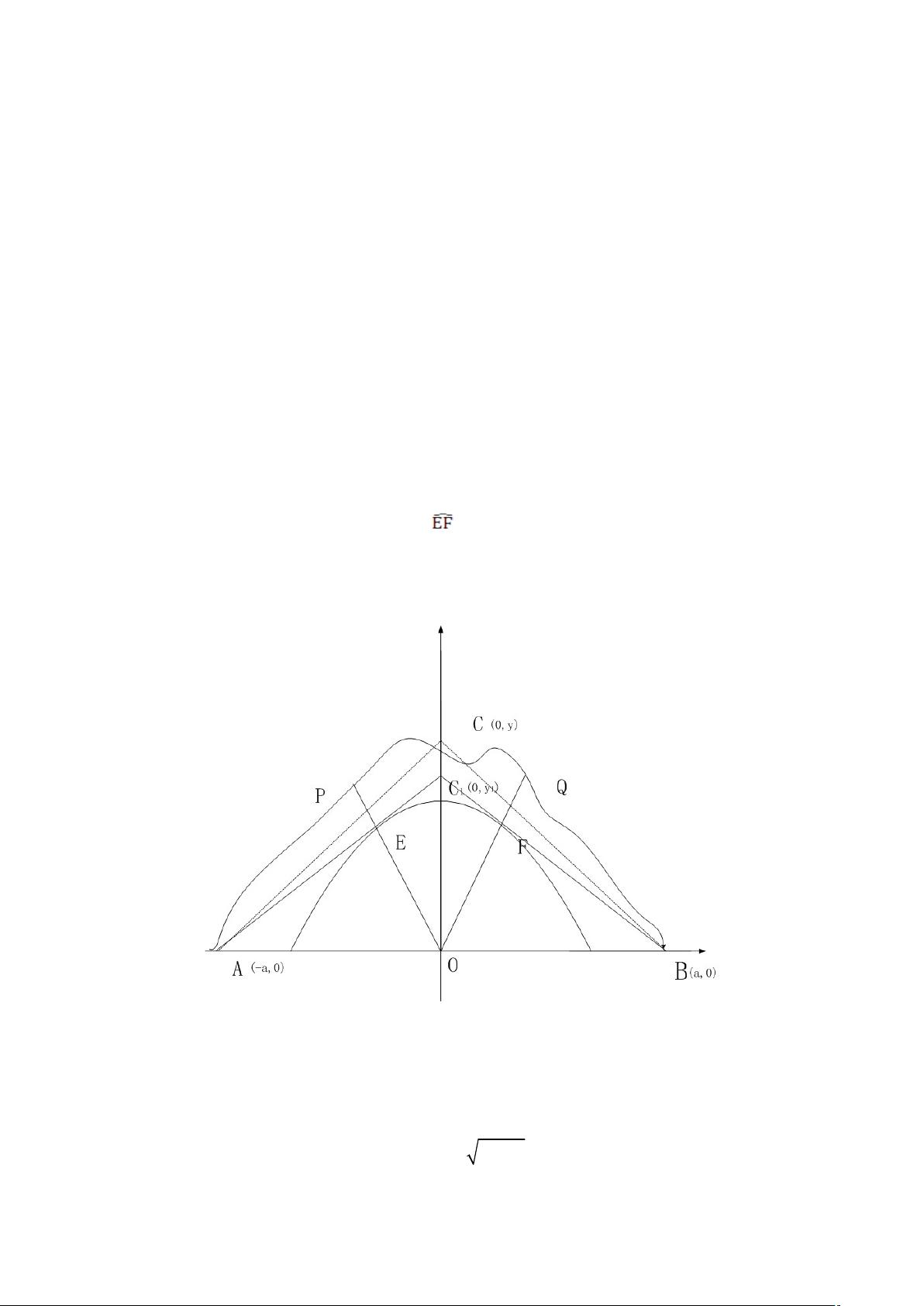
证明:假设在平面中有 A(a,0)和 B(-a,0)两点,中间有一个半圆形的
障碍物,证明从 A 到 B 的最路径为 A B。
平面上连接两点最短的路径是通过这两点的直线段,但是连接两点的线段于
障碍物相交,所以设法尝试折线路径。在 y 轴上取一点 C(0,y),若 y 适当大,
则折线 ACB 与障碍物不相交,折线 ACB 的长度为:
2 2
| | 2 a +yACB =
图 1-1
剩余18页未读,继续阅读

omyligaga
- 粉丝: 72
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- zlib-1.2.12压缩包解析与技术要点
- 微信小程序滑动选项卡源码模版发布
- Unity虚拟人物唇同步插件Oculus Lipsync介绍
- Nginx 1.18.0版本WinSW自动安装与管理指南
- Java Swing和JDBC实现的ATM系统源码解析
- 掌握Spark Streaming与Maven集成的分布式大数据处理
- 深入学习推荐系统:教程、案例与项目实践
- Web开发者必备的取色工具软件介绍
- C语言实现李春葆数据结构实验程序
- 超市管理系统开发:asp+SQL Server 2005实战
- Redis伪集群搭建教程与实践
- 掌握网络活动细节:Wireshark v3.6.3网络嗅探工具详解
- 全面掌握美赛:建模、分析与编程实现教程
- Java图书馆系统完整项目源码及SQL文件解析
- PCtoLCD2002软件:高效图片和字符取模转换
- Java开发的体育赛事在线购票系统源码分析
