"ABB工业机器人编程-第四章.ppt:ABB机器人通讯及I/O配置详解"
56 浏览量
更新于2024-02-02
1
收藏 8.36MB PPT 举报
(精品)ABB工业机器人编程-第四章.ppt介绍了ABB工业机器人中的通讯模块。本章内容主要涉及ABB机器人的I/O通讯介绍、信号配置方法及监控与操作方式、Profibus总线配置方法、Profinet总线配置方法以及系统输入输出和可编程按键的使用。
首先,本章开始介绍了I/O的概念,即输入输出端口,通过I/O能使机器人与外部设备进行交互。在机器人中,数字量输入主要用于各种开关信号反馈,例如按钮开关、转换开关、接近开关等;同时也可用于传感器信号反馈,例如光电传感器、光纤传感器的输入;并且还可用于接触器、继电器触点信号反馈以及触摸屏中的开关信号反馈。数字量输出用于控制各种继电器线圈,如接触器、继电器、电磁阀;同时也可控制各种指示类信号,例如指示灯、蜂鸣器。需要注意的是,ABB机器人的标准I/O板的输入输出都是PNP类型。
接下来,本章详细介绍了ABB机器人的I/O通讯种类。ABB机器人提供了丰富的I/O通讯接口,其中包括与PLC的现场总线通讯。这种通讯方式可以实现机器人与PLC之间的信息传递与控制,进一步提高了机器人的应用灵活性和功能性。
此外,本章还介绍了信号的配置方法以及监控与操作的方式。通过对ABB机器人常用的标准I/O板卡的学习,可以了解到如何配置信号,以及如何监控和操作这些信号。这对于机器人的正常运行和故障排除具有重要意义。
在配置I/O通讯时,本章还介绍了Profibus总线配置方法和Profinet总线配置方法。这两种总线配置方法可以通过专门的硬件设备和软件工具来实现机器人与其他设备之间的通讯,提供了更加灵活和高效的通讯方式。
最后,本章还介绍了系统输入输出和可编程按键的使用。系统输入输出是机器人与外部设备进行数据交换的重要手段,而可编程按键则可以方便地对机器人进行控制和操作。
总的来说,本章对ABB工业机器人的通讯模块进行了详细的介绍和讲解,涵盖了丰富的内容,包括I/O通讯介绍、信号配置方法及监控与操作方式、Profibus总线配置方法、Profinet总线配置方法以及系统输入输出和可编程按键的使用。通过学习本章内容,读者可以深入了解ABB机器人通讯的相关知识,掌握实际应用中的配置和操作技巧,从而更好地应用ABB工业机器人进行编程和控制。
© ABB
| Slide 16
4.2. ABB标准IO板卡介绍
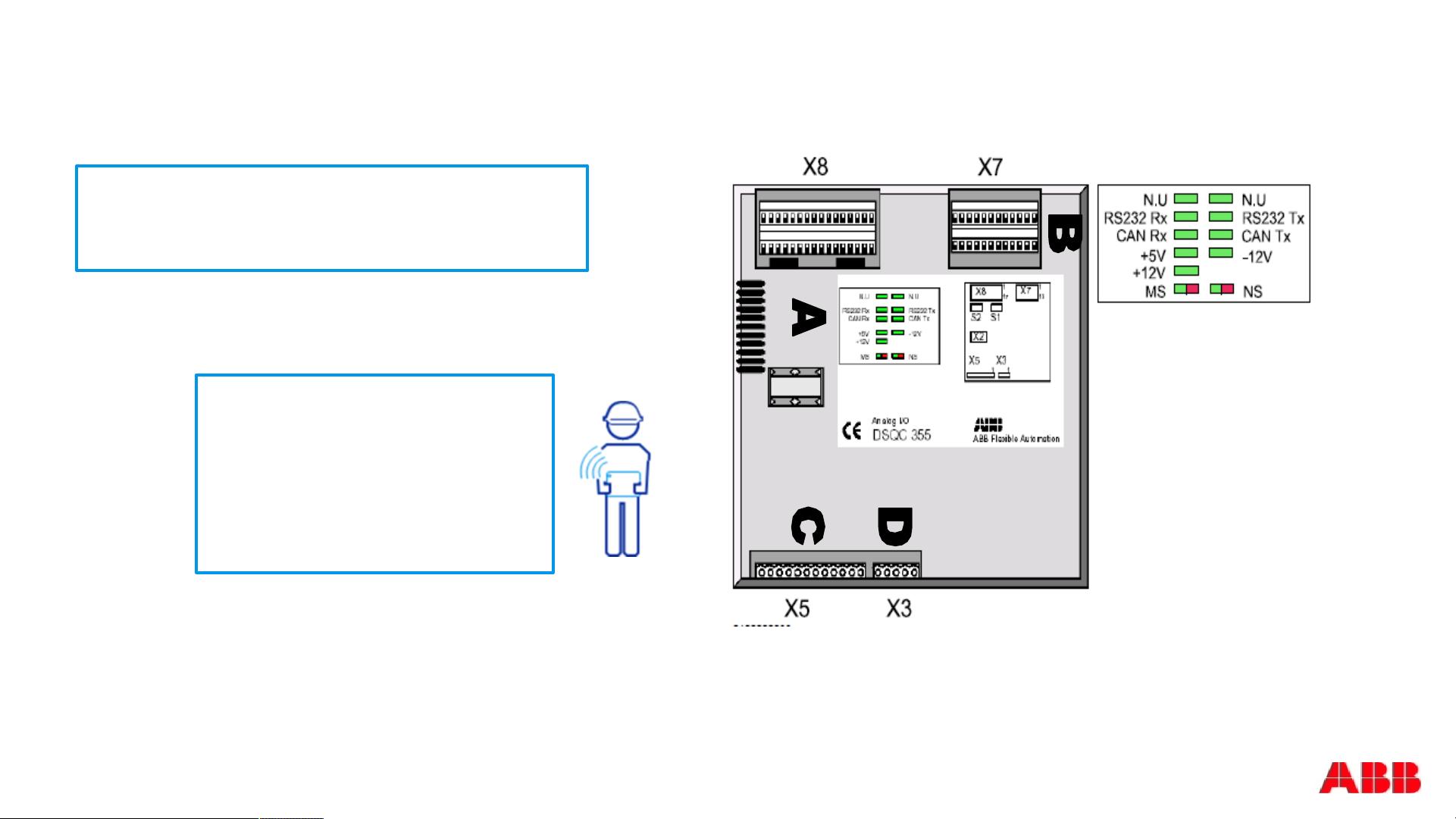
4.2.4 ABB标准I/O板 DSQC355A
DSQC355A板主要提供4个模拟输入信号和4个
模拟输出信号的处理
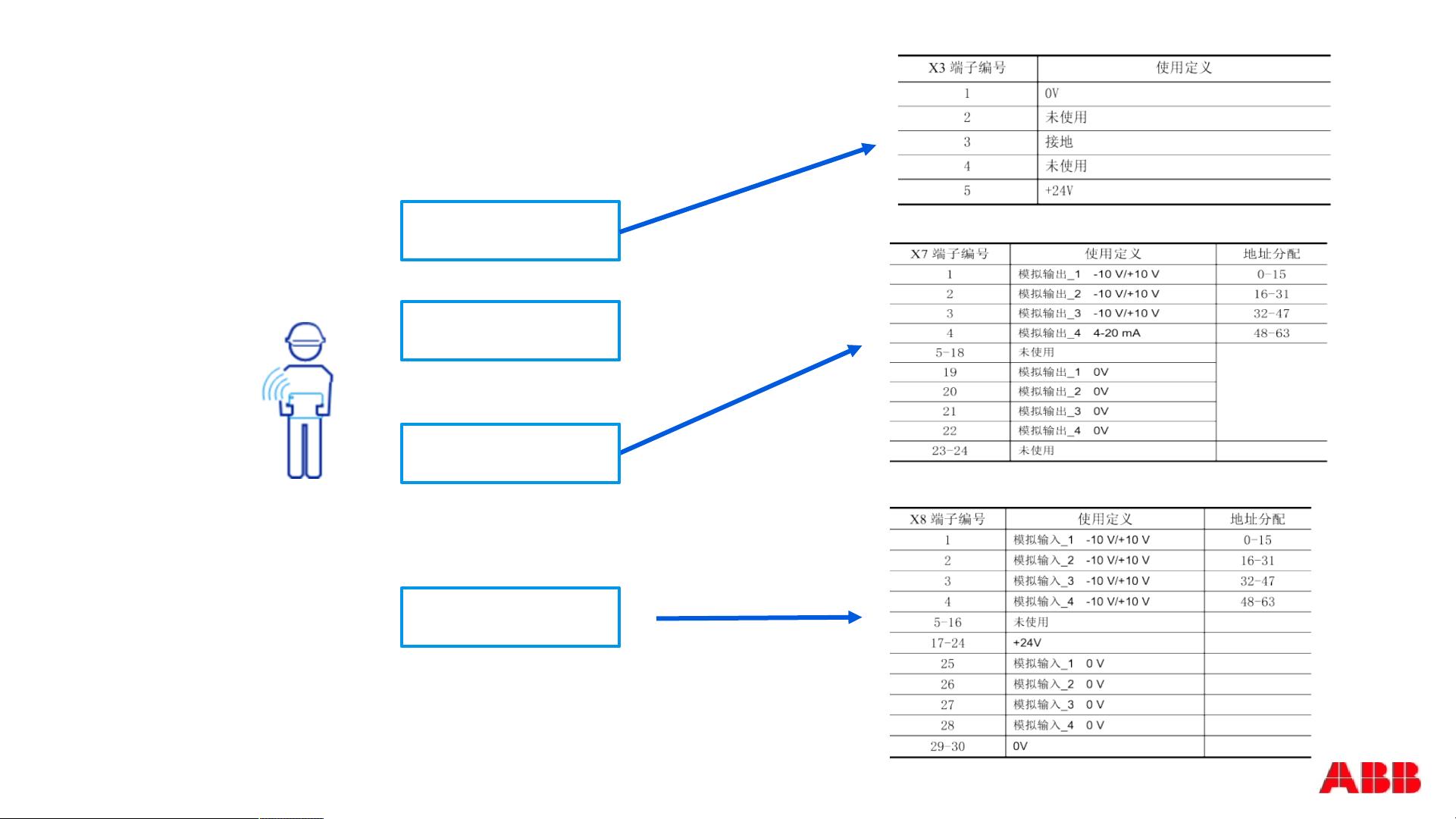
A X8模拟输入端口。
B X7模拟输出端口。
C X5是DeviceNet接口。
D X3是供电电源。
a.
模
块
接
口
说
明
剩余157页未读,继续阅读
2023-03-25 上传
2022-11-16 上传
2021-10-05 上传
2022-12-08 上传
2021-10-05 上传
2021-10-04 上传
2021-09-24 上传
点击了解资源详情
2021-10-05 上传

智慧安全方案
- 粉丝: 3837
- 资源: 59万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- fullcalendar-scheduler:FullCalendar附加组件,用于显示事件和资源
- hastscript:创建草木的实用程序
- Excel模板学生成绩统计表含图表.zip
- PushingWinJSForward:展示 WinJS Contrib 功能,突破 WinJS 的极限
- 【地产资料】3房地产教育培训.zip
- innersource
- Book-Recommend-Github:推荐生活当中积累的优秀Objective-C和Swift三方库
- PropertyAnimation
- sails-backbone-client:在浏览器中加载 Sails Backbone API
- 毕业设计&课设--毕业设计源码-基于Spark的Kmeans聚类算法优化.zip
- Excel模板财务报表收支表日记账.zip
- fuzzy-sys:交互使用systemctl的实用工具
- 净水阶段
- APPG-scrape:APPG清单的刮板
- movie-picker
- hinahina.com
