环形拓扑多目标粒子群优化器:解决多模态多目标问题新方法
177 浏览量
更新于2024-08-26
1
收藏 1.6MB PDF 举报
"使用环形拓扑的多目标粒子群优化器解决多模态多目标问题"
本文主要介绍了一种新的多目标粒子群优化器(MOPSO),该优化器针对具有多个帕累托最优解的多模态多目标优化问题进行设计。在多模态多目标问题中,可能存在多个帕累托最优解对应于相同的函数值。环形拓扑的概念被引入到粒子群优化算法中,以增强算法的稳定性,并帮助识别更多的帕累托最优解。
传统的粒子群优化算法在处理多模态问题时可能会遇到困难,因为它们可能无法有效地探索和维护多样性的解集。为了解决这个问题,该论文提出了一种基于索引的环形拓扑结构。在这种结构中,粒子按照特定的顺序排列,形成一个循环网络,使得信息交换更加均匀,有助于发现更多局部最优解,从而增加找到全局最优解的概率。
此外,为了评估决策空间和目标空间中的解分布质量,该方法采用了一种特殊的拥挤距离概念作为密度度量标准。拥挤距离是一种衡量解之间密度的方法,它可以帮助优化器在保持多样性的同时避免早熟收敛。通过调整这个度量,算法可以更好地平衡探索与开发,从而在决策空间和目标空间中获得更好的解分布。
为了验证新算法的性能,作者们设计了新的多模态多目标优化测试函数,并提出了一个新颖的性能指标。这些测试函数旨在模拟实际问题的复杂性,而新的性能指标则用于更全面地评估算法在寻找并维持帕累托前沿的能力。通过与其他知名多目标优化算法的比较,研究证明了所提出的环形拓扑MOPSO在解决此类问题上的优越性。
这篇研究论文为多模态多目标优化问题提供了一个有效的解决方案,通过创新的环形拓扑结构和拥挤距离策略,提高了算法在寻找和维持帕累托最优解集的效率和质量。这一工作对于多目标优化领域的理论研究和实际应用都具有重要的参考价值。
YUE et al.: MULTIOBJECTIVE PARTICLE SWARM OPTIMIZER USING RING TOPOLOGY FOR SOLVING MULTIMODAL MULTIOBJECTIVE PROBLEMS 807
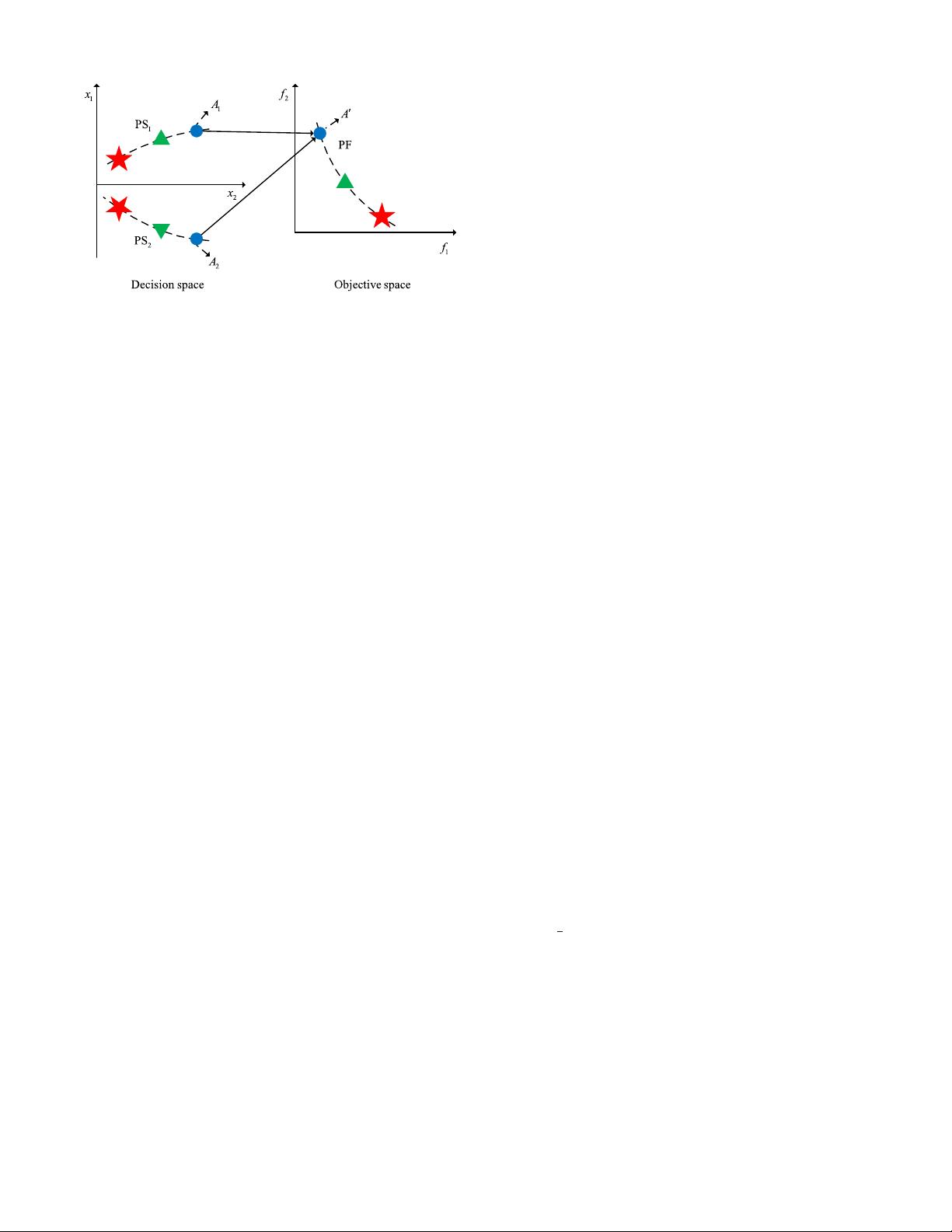
Fig. 2. Illustration of multimodal multiobjective problem.
approximate the PS and the PF. However, this algorithm can
only deal with multiobjective problems of class II [22]. Other
drawback of the method is the technique performs poorly when
the PS is a linear manifold.
Liang et al. [4] defined the multimodal multiobjective
optimization problem, which could be succinctly illustrated
through the diagram in Fig. 2. The figure shows a simple
diagram illustrating a case, where there are two PSs cor-
responding to the same PF. Liang et al. [4] proposed an
algorithm called DN-NSGAII conceived for the purpose of
locating more PSs. The technique first ranks solutions accord-
ing to nondominated sorting scheme and the solutions in
the same front are then sorted based on a decision-space
CD. Therefore, in DN-NSGAII the nondominated and less-
crowded solutions in the decision space are preferred. It has
been demonstrated that this algorithm can obtain more solu-
tions than NSGAII [23] and various other commonly used
multiobjective optimization approaches. However, the distri-
bution of solutions in the decision space is not very good (see
Fig. 9 (a) and (c) in [4]).
B. Framework of Particle Swarm Optimization
PSO is a population-based algorithm, which makes it par-
ticularly well suited for solving multimodal optimization
problems. PSO was inspired by the social behavior of birds
within a flock [14]. In this method, the historical personal best
position of a point (also called particle) is denoted pbest, and
the historical best position of its neighborhood is called nbest.
Each particle in the swarm is led by pbest and nbest to fly from
a starting position to a better area. Let x
i
(t) and v
i
(t) denote
the position and velocity of particle p
i
of the tth generation.
They are updated according to the following equations:
x
i
(t) =x
i
(t − 1) +v
i
(t) (4)
and
v
i
(t) = Wv
i
(t − 1) + C
1
r
1
x
pbest
i
−x
i
(t)
+ C
2
r
2
x
nbest
i
−x
i
(t)
(5)
where W is the inertia weight (often set to 0.7298, according
to [24]), C
1
and C
2
are constants (which satisfy the equal-
ity C
1
+ C
2
= 4.1[24]) used to balance exploration and
exploitation processes, and r
1
and r
2
are random values uni-
formly generated in the range [0, 1]. The key step in the
PSO methodology is the selection of leaders for the current
particles [25].
When extending PSO algorithms from the single-objective
to the multiobjective case, three issues become of particu-
lar significance: 1) the selection of a leader particle; 2) the
management of the distribution properties; and 3) the man-
agement of the convergence speed. Regarding the first issue,
the leader-particle selection is a relatively straightforward pro-
cedure in single-objective optimization, where one can simply
declare that particle with the largest fitness value is the best
candidates to serve as leaders. In multiobjective optimization,
however, the identification of a best leader among all the solu-
tions may become a challenging task due to inherent conflicts
introduced by the multiple objectives. In that case it is natu-
ral to give preference to nondominated solutions to serve as
candidates for the leader designation. Concerning the second
issue, it is necessary to develop of a methodology that can
ensure a good distribution of solutions in the decision space
and in the corresponding objective space. Finally, regarding
the third issue, the PSO convergence speed has been addressed
through a number of communication topologies. In particular,
the star, ring, and von Neumann topologies are known to be
effective in avoiding premature convergence. The topology-
based PSO algorithms are reviewed and compared in [26].
However, these topological approaches cannot induce stable
niches, and as a consequence in multimodal problems the
population converges to a single solution instead of multiple
solutions. In contrast, r3pso described in [12], which incor-
porates an index-based ring topology, has been demonstrated
through experimental results that it can form stable niches.
In addition, the algorithm does not require the introduction
of niching parameters, which is an attractive feature. The
three issues described here are addressed in the new algorithm
described in the next section.
III. D
ESCRIPTION OF MO_RING_PSO_SCD
As a population-based algorithm, PSO has the capability,
and hence the natural advantage of searching for multiple
optima in a single run. In multimodal multiobjective opti-
mization problems, where a large number of Pareto-optimal
solutions should be searched for and maintained, PSO is there-
fore a natural choice for use as an optimizer. Inspired by the
single-objective particle swarm optimizer using ring topology
proposed by Li [12], this paper proposes a multiobjective PSO
algorithm with ring topology, and includes a SCD, which the
authors denote by the acronym MO_Ring_PSO_SCD. In this
section, the
MO_Ring_PSO_SCD procedure is presented fol-
lowed by a discussion of its underlying mechanism for the
purpose of analyzing how and why the proposed algorithm
can successfully address multimodal multiobjective problems.
Finally, the novelty of the proposed algorithm is described
and the convergence behavior of MO_Ring_PSO_SCD is
compared with that of alternative algorithms.
A. Procedure of MO_Ring_PSO_SCD
In MO_Ring_PSO_SCD, the personal best archive (PBA)
and the neighborhood best archive (NBA) are first estab-
lished, and then the pbest and gbest are selected from the two
respective archives. Ring topology is used to induce multiple
剩余12页未读,继续阅读
352 浏览量
2024-10-24 上传
2021-09-29 上传
284 浏览量
301 浏览量
265 浏览量
173 浏览量
138 浏览量
257 浏览量

weixin_38651450
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB编程基础与科学工程应用
- Oracle BIEE商务智能:企业信息化与实战分享
- Matlab7官方学习指南:入门与资源
- Fedora 10 发行说明:关键更新与改进
- PETER MARWEDEL的嵌入式系统设计第二版概览
- CISCO的网上营销策略与顾客服务体系
- 2008年沈阳机床公司IBM笔记本与联想PC机采购招标详情
- 淮海工学院校园网设计实践:从规划到实施
- 2007年4月二级C++考试试题解析与关键知识点回顾
- Oracle面试必备:SQL题目与解答
- 2008年9月二级C++笔试试题与答案解析
- Oracle学习指南:SQLPLUS命令与基础操作详解
- Struts2权威指南:从入门到精通
- JbossEJB3.0实战教程:从入门到精通
- 掌握线程管理:启动与通信策略
- 模拟分页存储管理:地址转换与缺页中断机制详解
