"目标检测算法综述:区域选择及深度学习方法的探讨"
需积分: 0 32 浏览量
更新于2024-01-20
收藏 1.55MB PDF 举报
SIGAI1012-目标检测算法综述1;介绍
目标检测是计算机视觉和数字图像处理的一个热门方向,广泛应用于机器人导航、智能视频监控、工业检测、航空航天等诸多领域,通过计算机视觉减少对人力资本的消耗,具有重要的现实意义。目标检测也是近年来理论和应用的研究热点,它是图像处理和计算机视觉学科的重要分支,也是智能监控系统的核心部分。
目标检测在泛身份识别领域是一个基础性的算法,对后续的人脸识别、步态识别、人群计数、实例分割等任务起着至关重要的作用。随着深度学习的广泛运用,目标检测算法得到了较为快速的发展。
本文通过广泛调研国内外目标检测方法,主要介绍基于深度学习的两种目标检测算法思路,分别为One-Stage目标检测算法和Two-Stage目标检测算法。
One-Stage目标检测算法将目标检测和目标定位同时完成,通过将图像划分为多个区域,然后使用分类器预测每个区域中是否包含目标,并对包含目标的区域进行边界框的回归,从而完成目标检测任务。这类算法具有较高的速度和一定的准确性,适用于实时性要求较高的应用场景。
Two-Stage目标检测算法将目标检测任务分为两个阶段,首先通过一个候选框生成器选出可能包含目标的区域,然后再对这些候选框进行分类和边界框的回归。这类算法具有较高的准确性,适用于对精度要求较高的应用场景,但速度较慢。
在目标检测的整个流程中,区域选择是一个关键步骤,其目的是对目标的位置进行定位。由于目标可能出现在图像的任何位置,而且目标的大小、长宽比例也不确定,因此最初采用滑动窗口的策略,对整幅图像进行多次滑动窗口的分类,来确定目标的位置。但这种方法计算量大且效率低下。
为了解决滑动窗口带来的问题,研究者们提出了一些更加高效的区域选择方法,如R-CNN算法将滑动窗口替换为选择性搜索方法,该方法首先通过快速模式检测器选择候选框,并根据候选框的重叠率和类别概率进行排列,然后在每个候选框上进行卷积操作并得到特征表示,并通过支持向量机分类器进行目标检测。而Faster R-CNN算法则引入了候选框生成网络,通过该网络生成候选框,然后将生成的候选框传递给卷积网络进行目标检测。
除了One-Stage和Two-Stage目标检测算法外,还存在其他一些目标检测算法的改进方法,如YOLO算法通过对整幅图像分成多个格子,并对每个格子进行分类和边界框的回归来实现目标检测。这些改进方法在一定程度上提高了目标检测的速度和准确性。
总体来说,目标检测算法在近年来得到了较为快速的发展,其中基于深度学习的方法具有较高的准确性和效率。随着深度学习技术的进一步发展和算法的改进,目标检测算法将在更多的领域得到应用,并为实际问题的解决提供更好的支持。
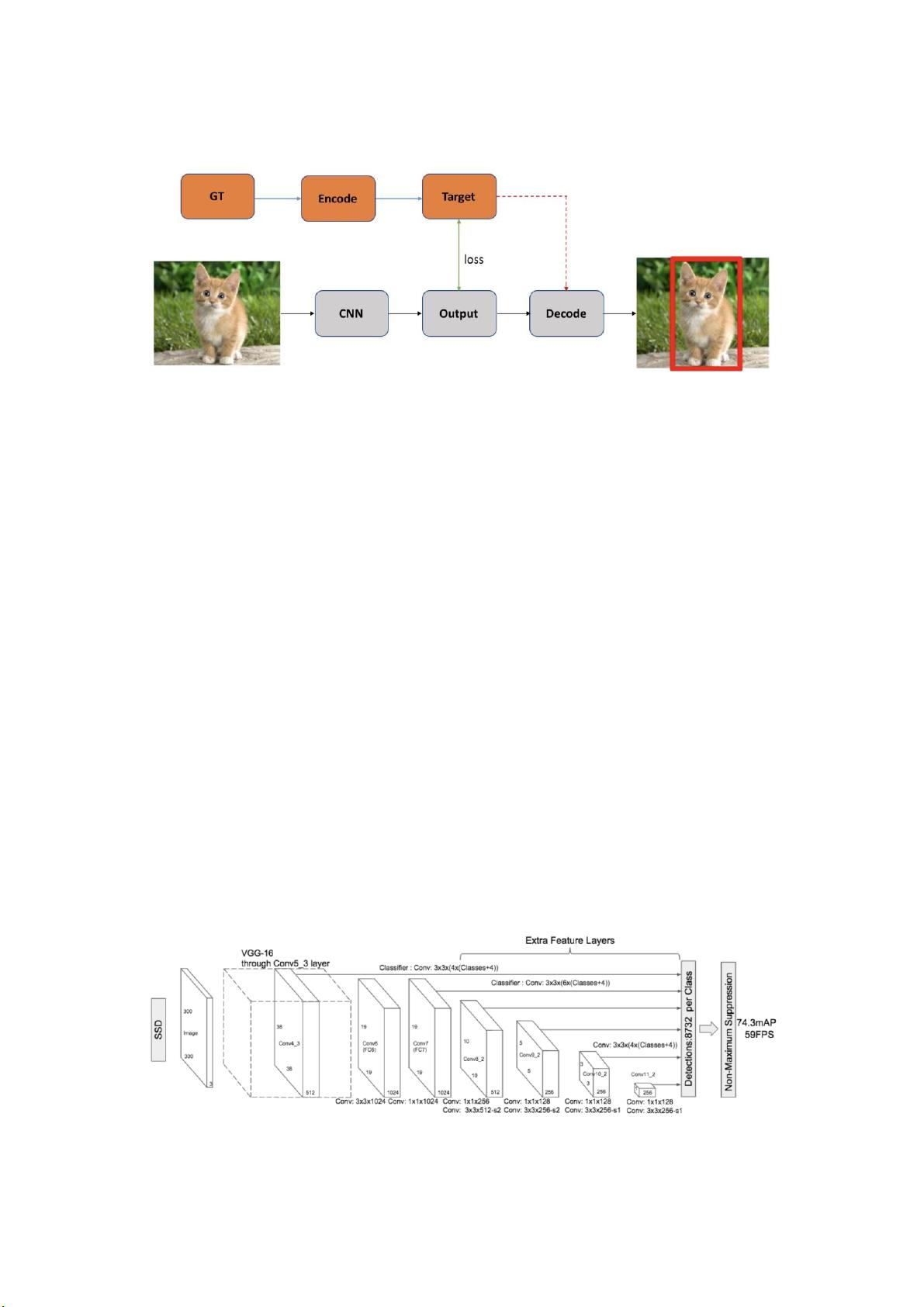
时候需要将 Ground Truth 编码成 CNN 输出对应的格式以便计算对应损失 loss。
图 2:One-Stage 检测算法示意图
目前对于 One-Stage 算法的主要创新主要集中在如何设计 CNN 结构、如何构建网络
目标以及如何设计损失函数上,接下来我将从这几个方面进行阐述。
2.2.1 如何设计 CNN 结构
设计 CNN 网络结构主要有两个方向,分别为追求精度和追求速度。最简单的一种实现
方式就是替换 Backbone 网络结构,ResNet101 的表征能力要强于 MobileNet,然而
MobileNet 的计算量要远远低于 ResNet101,如果将 ResNet101 替换为 MobileNet,那
么检测网络在精度应该会有一定的损失,但是在速度上会有一定提升;如果将 MobileNet
替换为 ResNet101,那么检测网络在速度上会有一定的损失,但是在精度上会有一定的提
升。当然这只是一种相对简单的改进 CNN 网络结构的方式,实际上在改进 CNN 结构的时
候需要很多的学术积累和经验,我将通过几篇 SSD 相关论文做一下简要分析。
SSD
[5]
:SSD 检测算法的网络结构如下图所示,其中 Backbone 为 VGG 网络,使用不
同阶段不同分辨率的 feature map 进行预测。
图 3:SSD 网络结构示意图
剩余17页未读,继续阅读
2018-06-26 上传
2018-06-26 上传
2018-06-26 上传
2019-11-10 上传
2018-06-30 上传
2019-03-17 上传

型爷
- 粉丝: 24
- 资源: 337
 我的内容管理
展开
我的内容管理
展开







