"六自由度机器人正逆运动学和轨迹规划分析"
需积分: 0 127 浏览量
更新于2024-03-15
2
收藏 864KB DOCX 举报
机器人技术是一门综合性的应用技术,涵盖了机械、自动控制理论、机器视觉等多个科学领域。随着机器人制造成本的降低和人工劳动力成本的增加,机器人开始在工业、医疗等领域得到广泛应用,提高了产品质量和效率,也是未来发展的必然趋势。因此,对机械臂关键技术的研究具有重要的科研意义。
机械臂是工业机器人中最重要的类型之一,由多个刚性连杆组成,连杆之间通过关节串联。运动学分析是机械臂控制的关键因素之一,直接影响到轨迹规划和控制的精度。针对六自由度机器人的位置正逆解问题进行了大量研究,Denavit和Hartenberg在1954年提出了DH方法, DH方法分为前置法和后置法,可以描述空间中刚体的位姿,是目前分析串联机器人运动学最常用的方法之一。此外,还有其他方法如POE法来描述机构运动学参数。本文的研究对象是六自由度搬运机械臂,通过标准的D-H模型对其进行运动分析。
本文主要基于Robotics Toolbox14.0工具箱在Matlab环境下进行研究,主要包括对六自由度机器人的正逆运动学分析、求解和仿真,以及轨迹规划的仿真。通过对机器人的结构和参数进行分析,可以确定其运动学关系,进而实现控制算法的设计和优化。正运动学是指根据机械臂的关节位置求解末端执行器的位置姿态,逆运动学则是根据末端执行器的位置姿态求解关节位置。通过正逆解求解,可以实现机械臂的精确控制和定位。
在轨迹规划方面,研究了六自由度机器人的轨迹规划算法,通过仿真分析不同的规划方法对机械臂运动轨迹的影响。轨迹规划是机器人控制中的关键问题之一,能够有效地调整机械臂的运动轨迹,提高工作效率和控制精度。通过对机器人在三维空间中的轨迹规划,可以实现复杂任务的自动化执行,提高生产线的效率和灵活性。
综上所述,本文通过对六自由度搬运机器人的正逆运动学分析和轨迹规划的研究,为机械臂控制和应用提供了重要的理论基础和实践指导。通过建立模型、求解运动学关系和优化控制算法,可以实现机械臂的精确运动和灵活控制,推动机器人技术在各领域的广泛应用,促进工业自动化和智能制造的发展。未来的研究方向包括机器人智能化、协作控制和自适应算法等,将进一步推动机器人技术的发展和应用。
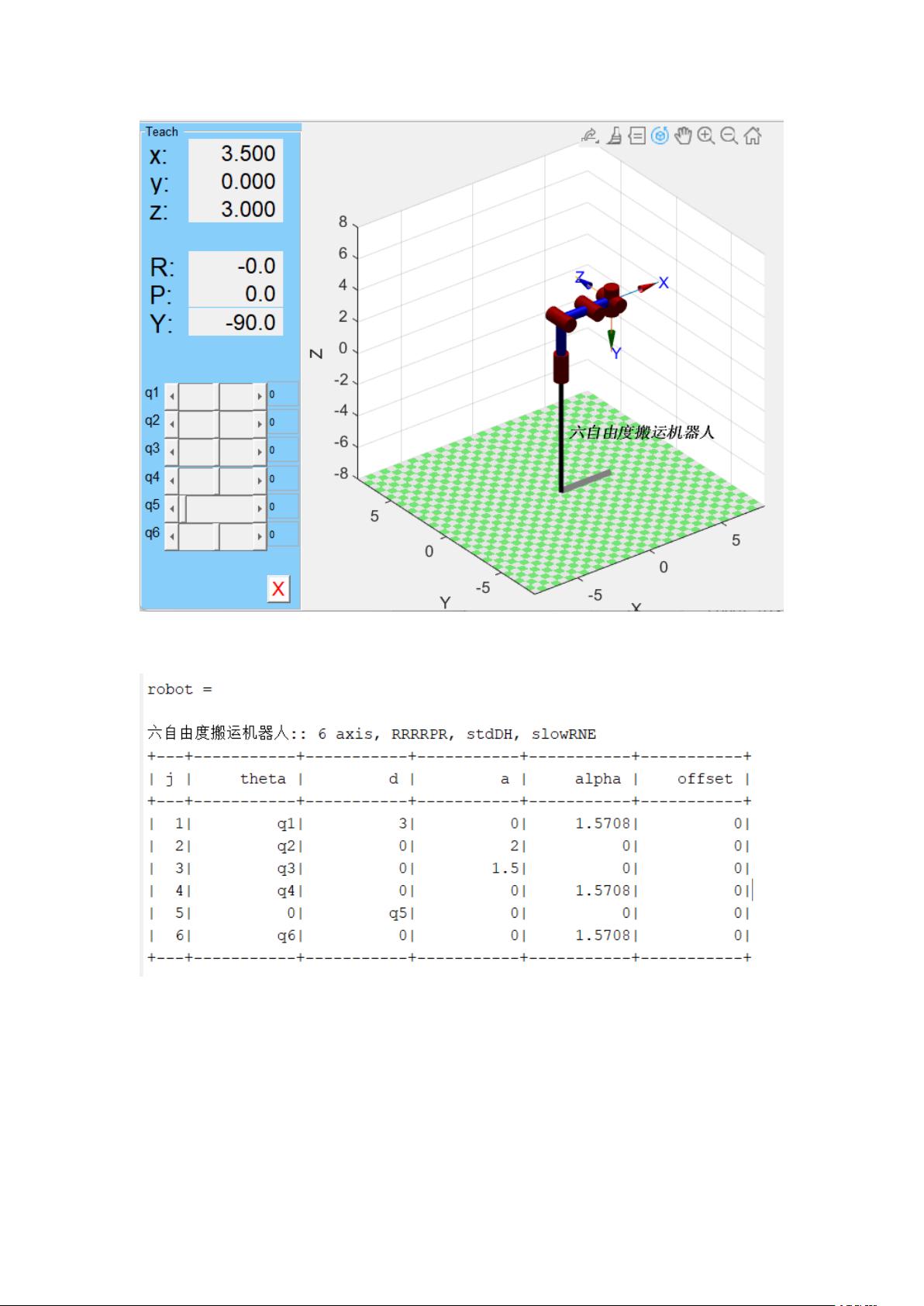
图 2.3 机器人建模的 MATLAB 仿真
Figure.2.3 MATLAB simulation of robot modeling
表 2.3 MATLAB 打印的 D-H 参数表
Table 2.3 Table of D-H parameters printed by MATLAB
3 正向运动学分析
3.1 机械臂关节角度与末端机构位置姿态的求解
机器人的正运动学建模,前提是已知机器人六个关节的转角,求解机器人
剩余16页未读,继续阅读
2022-06-03 上传
2022-11-13 上传
2021-09-24 上传
2022-07-12 上传
2022-07-10 上传
2023-02-27 上传

Aatrox雷
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 毕业设计&课设-混合动力电动汽车的性能和效率仿真.zip
- crunch:高级 DXTc 纹理压缩和转码库
- Water-plant-scheduler:该应用程序使用户能够为其植物创建浇水时间表。 功能包括
- VNET:肺肿瘤分割
- Terraia-ChestTweaks:Minecraft Mod,仿写 Terraria 的箱子整理功能
- matlab求导代码-CO2-System-Extd:用于MATLAB(或GNUOctave)的CO2SYS软件,用于计算海洋CO2系统变量并
- ABB快速上手神器.zip
- 毕业设计&课设-基于Matlab的Intertial导航仿真.zip
- zoomy:终端的Zoom实用程序
- CODE injector-crx插件
- 猜猜我有多爱你flash动画
- matlab求导代码-PRST:Python水库模拟工具箱
- driver_load.rar
- freeglut 3.2.1 vs2017 64位
- dhh
- nodejs-dashboard:来自终端的node.js应用程序的遥测仪表板!
