MissionPlanner飞控配置教程:固件加载与传感器校准详解
版权申诉
40 浏览量
更新于2024-09-01
收藏 1.91MB DOC 举报
在本教程中,我们将详细介绍如何使用MissionPlanner软件对飞控系统进行配置。首先,启动MissionPlanner软件,你需要进入"初始设置",选择正确的串口,如4PX4FMU(4),并设置波特率为115200,以确保与飞控板的连接。然后,点击"安装固件",通过文件选择对话框加载自定义固件,这一步骤用于更新飞控板的定制软件版本。
一旦固件下载完成,软件会提示等待飞控板上播放的音乐停止,这是为了确保下载操作的同步性。当音乐停止后,确认并点击"OK",下载过程完成,显示"UploadDone",表明飞控板的软件已成功更新。
接下来,点击"连接"图标,与飞控板建立连接,进入到调试界面。此时,你会看到新增的"必要硬件"选项,包括"机架类型"、"加速度计校准"、"罗盘"、"遥控器校准"和"飞行模式"以及"故障保护"。其中,机架类型、飞行模式和故障保护可自定义设置,而加速度计、罗盘和遥控器则需要用户手动校准。
对于加速度计校准,你需要将飞控板分别置于水平、左、右、上、下以及翻转的位置,并依次点击对应的校准按钮进行校准。校准完成后,软件会显示校准成功。
罗盘校准则需旋转飞控板,确保所有白色标记覆盖,形成一个完整的球形,然后点击"Done"或等待校准过程自动结束,软件会显示校准后的罗盘数据。
遥控器校准是通过进入"遥控器校准"界面,点击"校准遥控",要求操作者移动遥控器的每个摇杆至其最大和最小位置,确保其灵敏度和范围设置准确。
使用MissionPlanner软件配置飞控系统涉及了多个步骤,包括固件升级、连接设备、校准关键硬件组件,这些都是确保飞行器稳定性和精确控制的关键环节。务必按照顺序和指导操作,以获得最佳效果。
word
1、 打开 Mission Planner 软件,进入初始设置选项
选择串口为 4 PX4 FMU(4),波特率设置为 115200
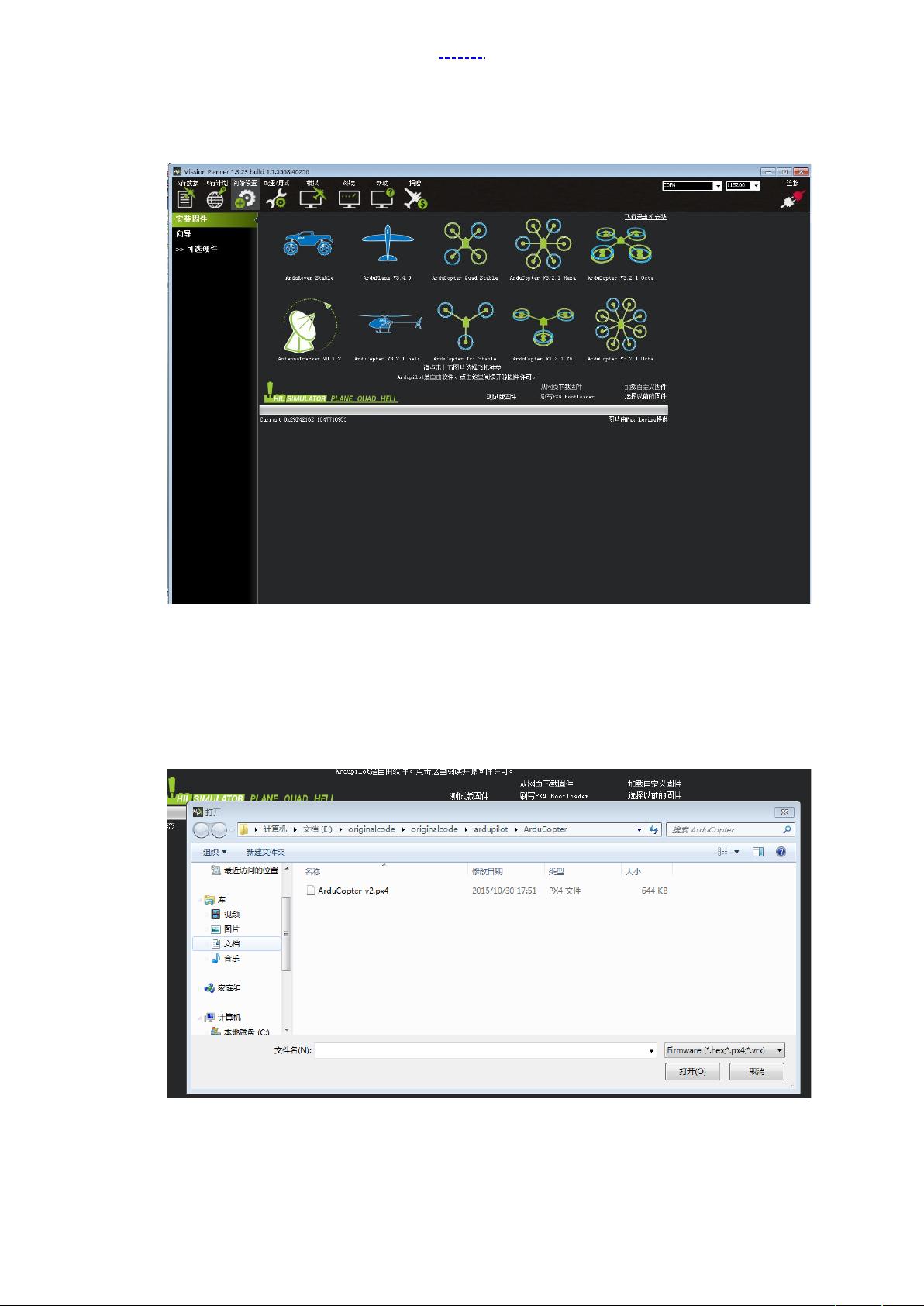
2、 选择安装固件-》加载自定义固件
会弹出一个文件选择对话框,来选择自定义文件
3、 点击自定义文件,选择“打开〞选项,选中该文件,
1 / 9
下载后可阅读完整内容,剩余8页未读,立即下载
264 浏览量
2024-11-02 上传
2024-11-05 上传
2024-11-02 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情









