基于PID的双闭环控制:一阶倒立摆仿真与鲁棒性测试
版权申诉
本研究设计了一个基于双闭环PID控制的一阶倒立摆控制系统,该系统主要应用于自动控制原理的课程设计中。系统的核心目标是通过检测小车位置和摆杆摆角,利用工业控制计算机(IPC)实时调整驱动电动机的力,实现倒立摆位置的伺服控制。设计过程包括以下几个关键步骤:
1. 对象模型与线性化:
- 首先,通过理论分析建立了一阶倒立摆的实际模型,即状态方程,考虑到工作点附近的变化,进行了线性化处理,得到简化模型,以便于控制器设计。
2. 子系统封装:
- 实际模型和线性化模型被封装为子系统,设计时将振子质量m和倒摆长度L作为用户可调参数,增强了系统的灵活性。
3. 控制策略设计:
- 由于系统为自不稳定非最小相位系统,设计了内外环的PID控制器,外环控制小车位置,内环控制摆杆摆角,确保系统的稳定性。
4. SIMULINK仿真:
- 在SIMULINK环境中进行仿真,采用了单位阶跃输入,通过模拟实际操作来验证控制效果。
5. 性能评估:
- 编写绘图程序,分析阶跃响应曲线,计算并记录最大超调量、调节时间和上升时间等性能指标,这有助于评价系统的动态性能。
6. 鲁棒性测试:
- 系统的鲁棒性通过改变振子质量和倒摆长度进行检验。例如,当振子质量变化时(1.5kg, 2kg, 2.5kg, 0.8kg, 0.5kg),以及倒摆长度变化时(0.5m, 0.6m, 0.2m, 0.1m),在相同的输入条件下,对比不同参数下的性能指标,以验证控制器对系统变化的适应能力。
这项设计不仅锻炼了学生的理论知识应用能力,也强化了他们对控制系统设计、仿真分析以及性能评估的理解,是一次实用性和理论性相结合的实践项目。
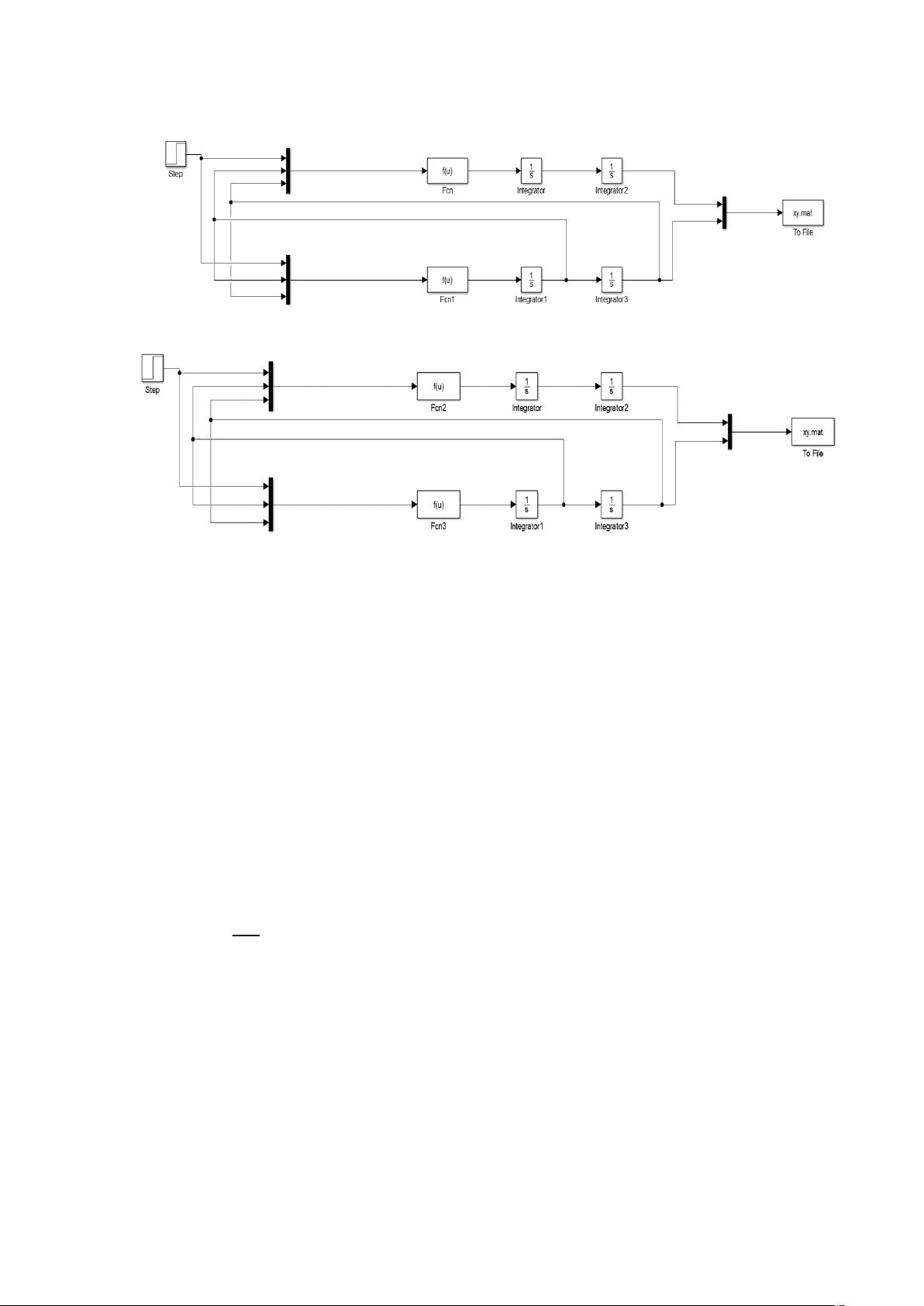
图 2 模型验证原理图
2、由状态方程可求得:
Fcn:(4/3*u[1]+4/3*m*l*sin(u[3])*power(u[2],2)-
10*m*sin(u[3])*cos(u[3]))/(4/3*(1+m)-m*power(cos(u[3]),2))
Fcn1:(cos(u[3])*u[1]+m*l*sin(u[3])*cos(u[3])*power(u[2],2)-
10*(1+m)*sin(u[3]))/(m*l*power(cos(u[3]),2)-4/3*l*(1+m))
Fun2:(4*u[1]-30*m*u[3])/(4+m)
Fun3:(u[1]-10*(1+m)*u[3])/(m*l-4/3*l*(1+m))
(其中 J =
m
L
2
3
,小车质量 M=1kg,倒摆振子质量 m,倒摆长度 2L,重力加速度
g=10m/
s
2
)
将以上表达式导入函数。
3、如下图框选后选择 create subsystem
剩余22页未读,继续阅读
2009-03-04 上传
2021-10-02 上传
2024-05-06 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

森旺电子
- 粉丝: 7854
- 资源: 427
 我的内容管理
展开
我的内容管理
展开







最新资源
- Until Dawn Wallpapers and New Tab-crx插件
- SpringBoot_Study:基于SpringBoot的技术学习代码库〜go go
- bigdata大数据学习与经验总结
- bbq:创建BigQuery数据集表的备份
- 汉王签名版ESP370&ESP560 ocx正式版-20150810.rar
- TicTacToe NotSoDeluxe:Java Tic Tac Toe游戏-开源
- raven-undefined
- CSCM37_pleiades_data_processed
- STM32F103RCT6满足你大学本科四年STM32的使用
- WWE 2K19 Wallpapers and New Tab-crx插件
- AsyncGenerator:使用ayn生成器函数的进度栏示例
- RegMAS - Regional Multi Agent Simulator-开源
- 仿易语言IDE工具条移动源码
- angularNotejs:带有 angularJS 和 noteJS 的 Webmail
- 并发的事务中保证数据表数据完整性的一些思考.rar
- Arduino_pid_beta
