
1.3.
论文的目标
3
车辆
车辆
-
火
车
-
火
车
我们可以将这些问题或应用场景抽象为三个主要问题:
1.
如何组织车辆和车队?
2.
车队之间的互动是如何进行的?
3.
什么样的战略可以帮助高效、可靠和安全地共享道路基础设施?
能够适应这些限制并能够考虑多层次方面的解决方案可以解决这些问题。
1.3 论文摘要
本论文的目的就是为解决这些问题定义模型。根据预期的属性,多智能体系统是一个有
价值的可能性。因此,我们在这篇论文中提出了一种方法,基于多智能体系统,其目的
是处理系统级的问题,主要集中在车辆之间的相互作用排,也称为车辆列车。所提出的
解决方案可以解决交通堵塞问题,无论是在系统层面上关注交通灯管理还是在个体车辆
上提供更好的控制和感知系统,旨在减少时间响应和/或增加道路容量。因此,我们提出
了一个合作控制系统,它依赖于多层次的决策过程,旨在处理在道路或网络节点的车队
的相互作用。
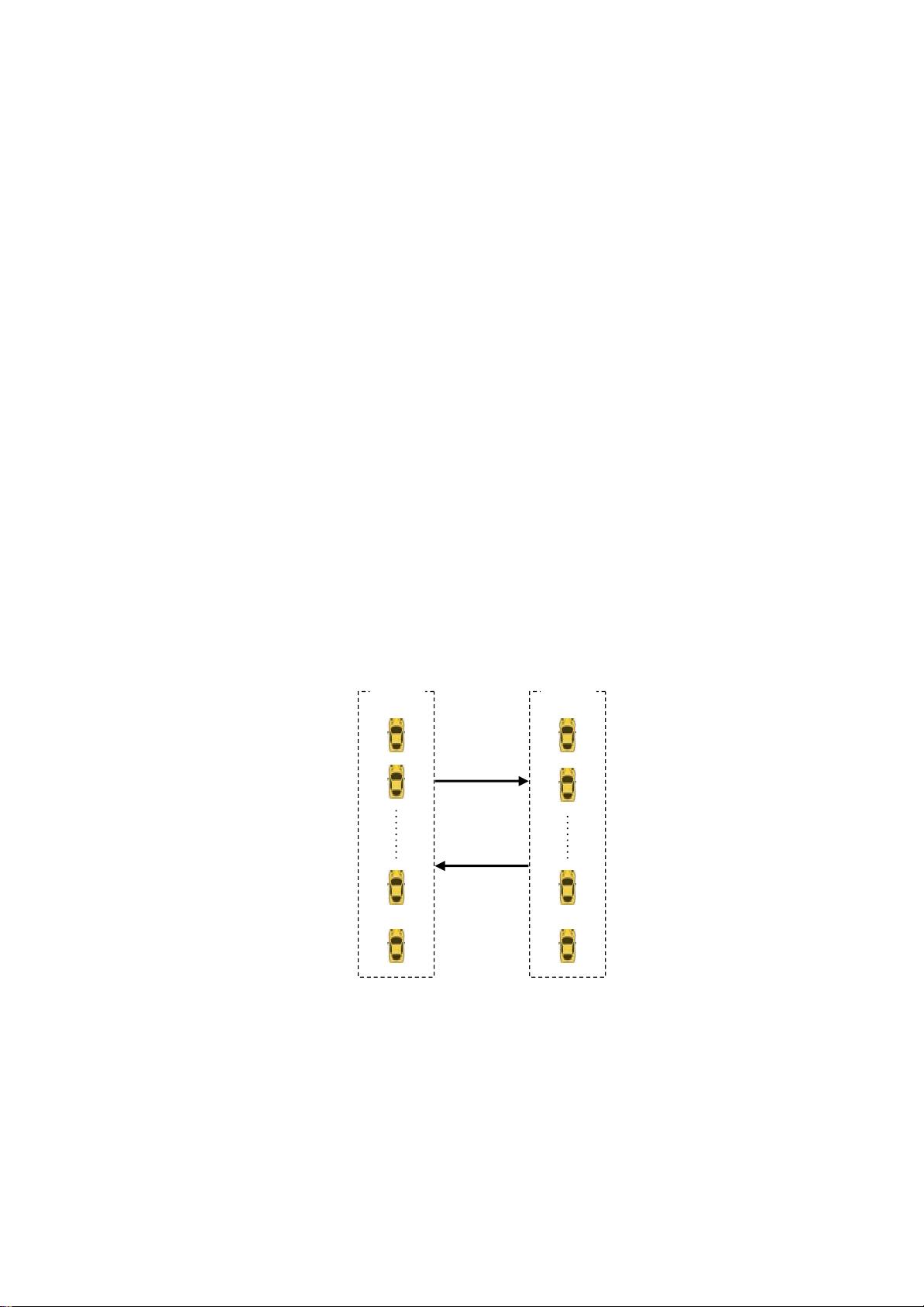
一些车辆结合在一起,组成一个车辆组
-
列车。车辆及车
-
车关系见图
1.2
。
图1.2-
每个车辆和车辆-列车被分配一个代理来响应相应的



剩余188页未读,继续阅读

cpongm
- 粉丝: 5
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 前端面试必问:真实项目经验大揭秘
- 永磁同步电机二阶自抗扰神经网络控制技术与实践
- 基于HAL库的LoRa通讯与SHT30温湿度测量项目
- avaWeb-mast推荐系统开发实战指南
- 慧鱼SolidWorks零件模型库:设计与创新的强大工具
- MATLAB实现稀疏傅里叶变换(SFFT)代码及测试
- ChatGPT联网模式亮相,体验智能压缩技术.zip
- 掌握进程保护的HOOK API技术
- 基于.Net的日用品网站开发:设计、实现与分析
- MyBatis-Spring 1.3.2版本下载指南
- 开源全能媒体播放器:小戴媒体播放器2 5.1-3
- 华为eNSP参考文档:DHCP与VRP操作指南
- SpringMyBatis实现疫苗接种预约系统
- VHDL实现倒车雷达系统源码免费提供
- 掌握软件测评师考试要点:历年真题解析
- 轻松下载微信视频号内容的新工具介绍
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


