MATLAB中构建数字电源零极点模型的技巧
需积分: 30 119 浏览量
更新于2024-07-15
2
收藏 606KB PPT 举报
"该资源是一个关于数字电源控制系统的MATLAB仿真教程,重点介绍了如何使用MATLAB/Simulink建立和转换控制系统模型,特别是零极点增益模型的应用。"
在数字电源的设计和分析中,理解并掌握控制系统模型是至关重要的。常见的数学模型包括传递函数模型、状态方程模型和零极点增益模型。这些模型可以互相转换,以适应不同的分析需求。本资料主要聚焦于使用MATLAB/Simulink这一强大的工具来实现这些模型的构建和转换。
首先,MATLAB中使用行向量表示多项式,其元素按照降幂顺序排列。例如,多项式 \( A(s) = s^2 + 3s + 2 \) 可以表示为 [2, 3, 1]。多项式乘法可以通过conv()函数实现,如 \( C(s) = A(s) \cdot B(s) \),这将两个多项式相乘并返回合并后的多项式系数向量。
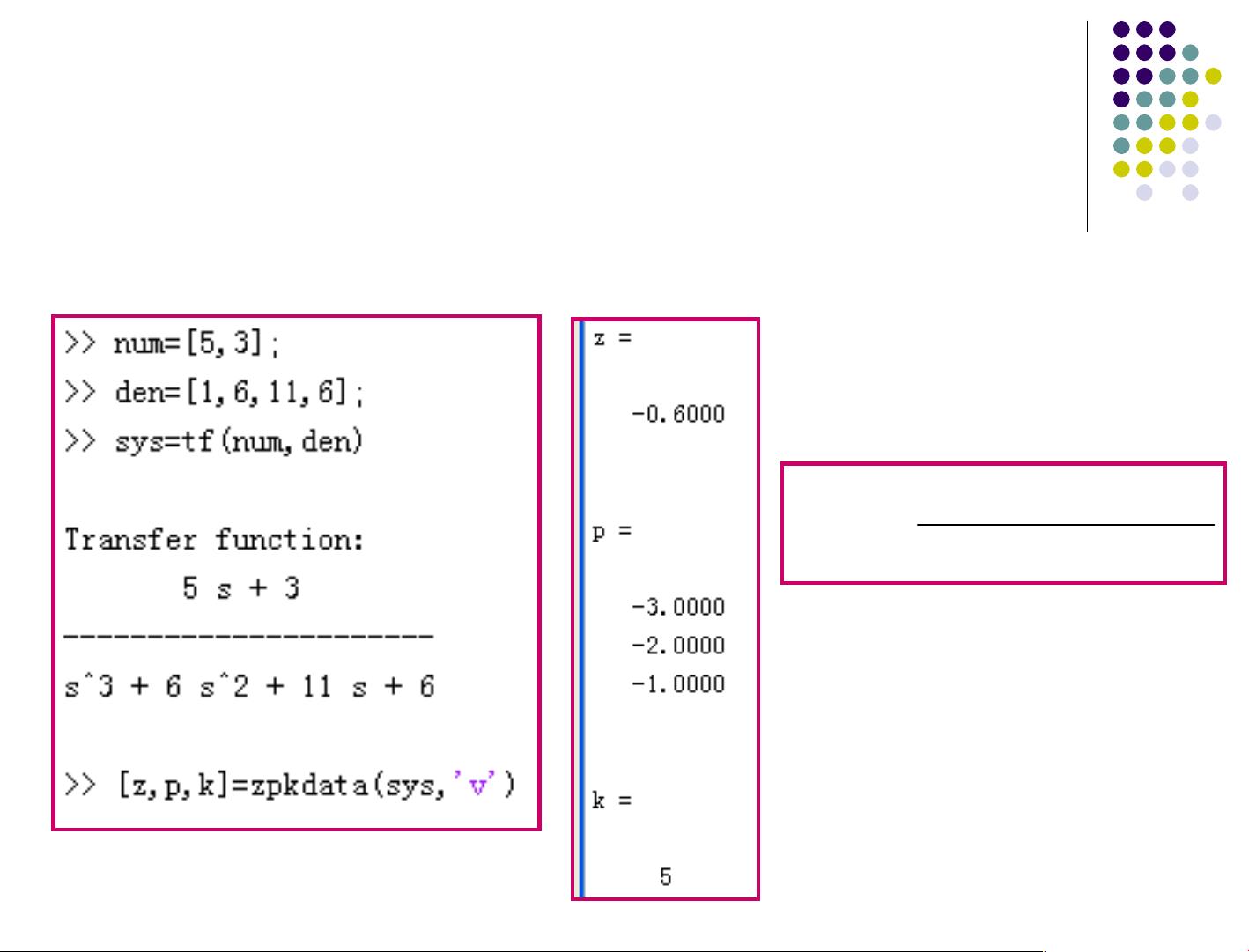
其次,roots()函数用于求解多项式的根,即系统的零极点。对于传递函数,可以分别计算分子和分母多项式的根,从而获取系统的零点和极点。例如,若传递函数 \( G(s) = \frac{b_2s^2 + b_1s + b_0}{a_2s^2 + a_1s + a_0} \),通过roots()函数可以找到其零点和极点。
再者,如果已知多项式的根,可以使用poly()函数来求出多项式的系数向量。例如,给定特征根r,poly(r)将返回对应的多项式系数。
传递函数模型是线性定常系统分析的基础,它描述了系统输入和输出之间的关系。在MATLAB中,传递函数通常表示为两个多项式系数向量num(分子)和den(分母),例如,对于上面的传递函数 \( G(s) \),num=[b2, b1, b0],den=[a2, a1, a0]。
在数字电源的控制设计中,建立准确的数学模型至关重要,因为它直接影响到控制算法的性能和稳定性。MATLAB/Simulink提供了一个直观的图形化环境,方便用户进行模型建立、仿真和优化,这对于数字电源的环路设计和控制器参数调整具有极大的帮助。
在实际应用中,设计师可以使用这些工具和概念来分析系统动态响应,评估控制策略的性能,并进行硬件在环(HIL)仿真,确保数字电源在各种运行条件下都能稳定工作。通过MATLAB/Simulink,可以更有效地实现从理论到实践的过渡,提升数字电源产品的设计质量和效率。
11
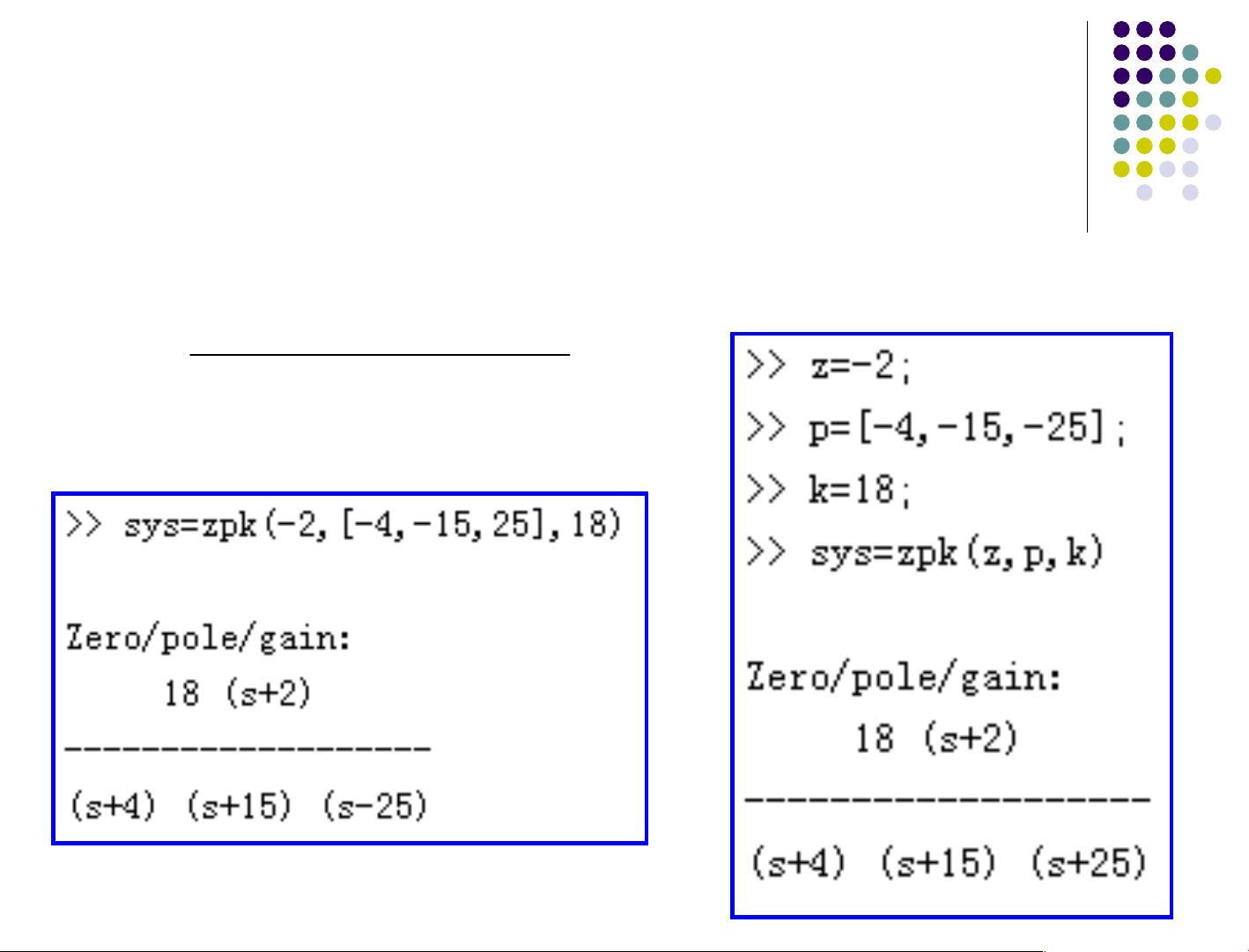
4.5.3 建立零极点形式的数学模型相关函数
为系统的增益向量。为系统增益,
为系统的极点向量;为系统的极点,
为系统的零点向量;为系统的零点,其中
极点模型表示为:单输入单输出系统的零
][K
][p
][z
)())((
)())((
)(
i
i
21
21
k
p
z
pspsps
zszszs
KsG
n
m
剩余63页未读,继续阅读
2020-12-17 上传
2012-05-02 上传
2022-11-15 上传
2022-10-16 上传
2021-10-12 上传
2023-07-29 上传
2022-11-16 上传
2022-05-17 上传

weixin_38604294
- 粉丝: 0
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- PureMVC AS3在Flash中的实践与演示:HelloFlash案例分析
- 掌握Makefile多目标编译与清理操作
- STM32-407芯片定时器控制与系统时钟管理
- 用Appwrite和React开发待办事项应用教程
- 利用深度强化学习开发股票交易代理策略
- 7小时快速入门HTML/CSS及JavaScript基础教程
- CentOS 7上通过Yum安装Percona Server 8.0.21教程
- C语言编程:锻炼计划设计与实现
- Python框架基准线创建与性能测试工具
- 6小时掌握JavaScript基础:深入解析与实例教程
- 专业技能工厂,培养数据科学家的摇篮
- 如何使用pg-dump创建PostgreSQL数据库备份
- 基于信任的移动人群感知招聘机制研究
- 掌握Hadoop:Linux下分布式数据平台的应用教程
- Vue购物中心开发与部署全流程指南
- 在Ubuntu环境下使用NDK-14编译libpng-1.6.40-android静态及动态库
