深度学习目标检测算法详解:物体定位与关键点检测
4 浏览量
更新于2024-08-27
收藏 1.2MB PDF 举报
"目标检测是计算机视觉领域的重要技术,用于识别和定位图像中的特定对象。本文主要涵盖了目标检测的两个应用场景:物体位置检测和物体关键点检测,并介绍了相关的算法特点。物体位置检测通过boundingbox来表示物体的位置,而物体关键点检测则关注于识别物体上的特定点或特征。"
在物体位置检测中,目标检测算法不仅需要识别图像中的物体类别,还需要给出物体在图像中的精确位置。Boundingbox是一个矩形框,用于包围图像中的目标物体。它由四个参数定义:中心点的横坐标 bx 和纵坐标 by,以及矩形框的高度 bh 和宽度 bw。模型的输出通常是一个向量,包含物体存在的概率 pc,以及boundingbox的四个参数,以及每个可能类别的概率 c1, c2, c3。
物体关键点检测,也称为landmark detection,适用于如人脸识别、人体姿态估计和衣物关键点检测等任务。该技术旨在确定物体上特定点(如人脸的眼睛、鼻子和嘴巴,或人体的关节)的精确坐标。对于每个关键点,模型会输出其在图像中的(x, y)坐标,如[l1x, l1y],[l2x, l2y],一直到[lnx, lny],形成一组坐标集合。
目标检测算法的发展经历了多个阶段,从早期的基于区域的算法(如R-CNN系列),到YOLO(You Only Look Once)和SSD(Single Shot MultiBox Detector)等单次预测方法,再到现代的基于Transformer的DETR(DEtection TRansformer)等。这些算法不断优化了检测速度和精度,使得目标检测在自动驾驶、安防监控、医疗影像分析等领域得到了广泛应用。
在训练目标检测模型时,通常需要大量的标注数据,包括物体的类别标签和对应的boundingbox信息。对于物体关键点检测,还需要关键点的精确坐标。常用的数据集有COCO(Common Objects in Context)、PASCAL VOC等,它们为研究者提供了丰富的训练和评估资源。
优化目标检测模型通常涉及网络架构的调整、损失函数的选择和训练策略的设定。例如,Focal Loss用于解决类别不平衡问题,而Anchor机制则帮助模型更好地处理不同尺度和比例的物体。此外,数据增强技术如翻转、缩放和裁剪也能提高模型的泛化能力。
目标检测算法在现代计算机视觉系统中扮演着核心角色,它的持续发展和改进推动了人工智能在多个领域的进步。无论是物体位置的精确框定,还是物体关键点的精确定位,都为理解和解释图像内容提供了强大的工具。
目标检测算法汇集介绍目标检测算法汇集介绍
目标检测算法
目标检测概念
目标检测这里阐述两个应用场景,1 为物体位置检测,2 为物体关键点检测。
1 物体位置检测
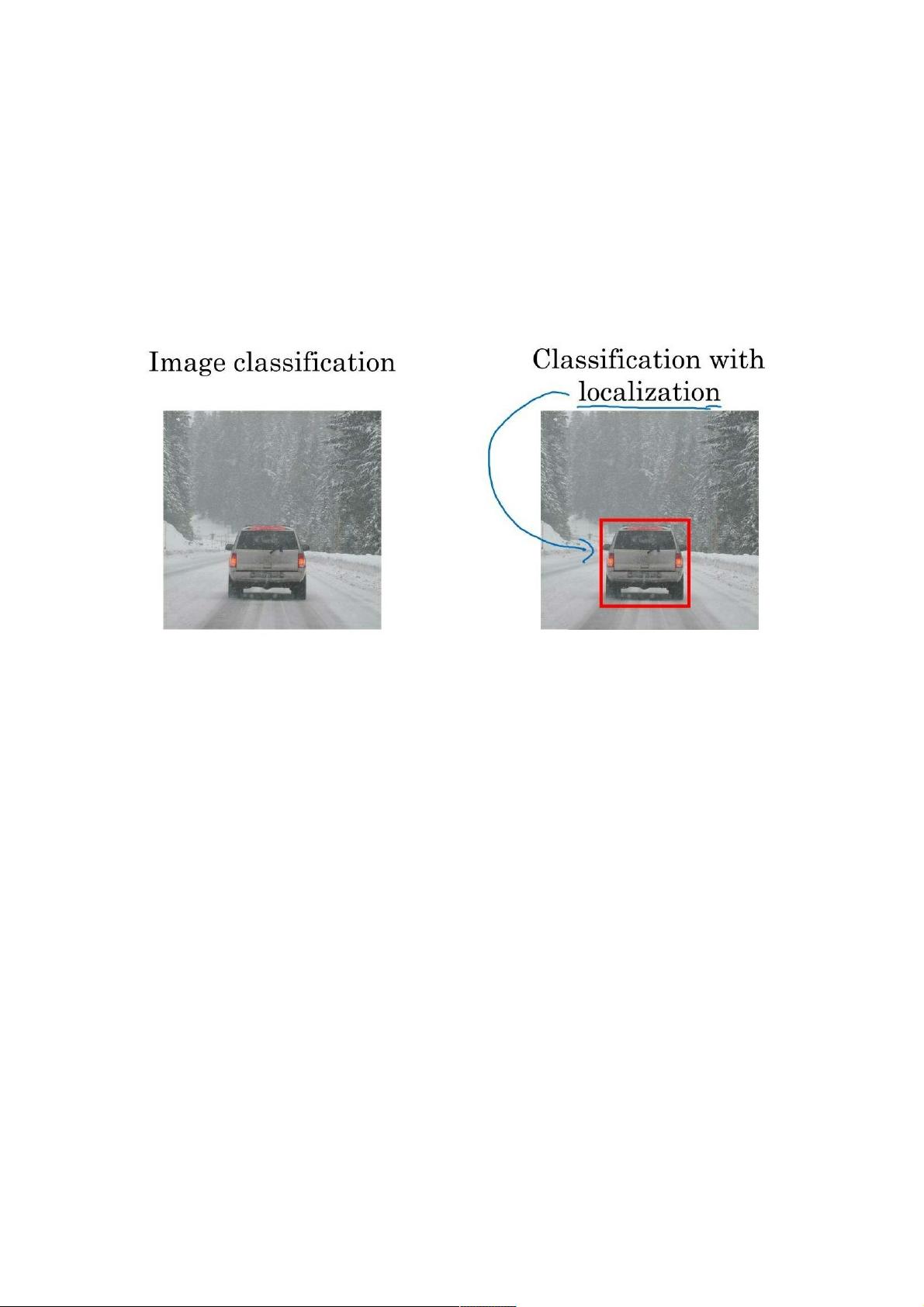
相比与图片分类,目标检测算法结果要求不仅识别出图片中的物理类别并且输出物体的位置参数。
物体的位置通过bounding box表示。bounding box指的是能够框出物体的矩形框在图片中的对应参数,如下图所示。
图中红色框,就称为一个bounding box,bounding box由个参数来描述[bx,by,bh,bw] [b_x, b_y, b_h, b_w][b x ,b y ,b h ,b w
], 其中(bx,by b_x, b_yb x ,b y )对应矩形框的中心点坐标,bh b_hb h 则对应矩形框的高度,bw b_wb w 则对一个矩形框的宽
度。如下图所示。
下载后可阅读完整内容,剩余7页未读,立即下载
318 浏览量
2023-04-23 上传
229 浏览量
2022-08-03 上传
178 浏览量
点击了解资源详情
243 浏览量
点击了解资源详情
315 浏览量

weixin_38722193
- 粉丝: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- 隐私数据清洗工具Java代码实践教程
- UML与.NET设计模式详细教程
- 多技术领域综合企业官网开发源代码包及使用指南
- C++实现简易HTTP服务端及文件处理
- 深入解析iOS TextKit图文混排技术
- Android设备间Wifi文件传输功能的实现
- ExcellenceSoft热键工具:自定义Windows快捷操作
- Ubuntu上通过脚本安装Deezer Desktop非官方指南
- CAD2007安装教程与工具包下载指南
- 如何利用Box平台和API实现代码段示例
- 揭秘SSH项目源码:实用性强,助力开发高效
- ECSHOP仿68ecshop模板开发中心:适用于2.7.3版本
- VS2012自定义图标教程与技巧
- Android新库Quiet:利用扬声器实现数据传递
- Delphi实现HTTP断点续传下载技术源码解析
- 实时情绪分析助力品牌提升与趋势追踪:交互式Web应用程序
