Freertos多线程实战:降低嵌入式系统编程难度
需积分: 48 150 浏览量
更新于2024-07-21
1
收藏 1.74MB PDF 举报
"Freertos多线程操作系统是一本实用指南,由Richard Barry撰写,专注于介绍在小型嵌入式系统中应用FreeRTOS实时操作系统的实践方法。该系统设计初衷是为微控制器而构建,旨在简化多任务处理的开发过程,特别是通过使用RAM系列来降低编程复杂度。
在第一章中,作者首先介绍了多任务的基本概念和在小型嵌入式环境中的应用。他强调了术语的一致性,并明确了本书的范围,主要关注FreeRTOS的核心功能,如任务创建、调度和优先级管理。
1.1章节深入讨论了任务的创建,通过`xTaskCreate()` API函数的使用示例,展示了如何定义和启动新任务。两个实例分别展示了如何编写任务代码和利用任务参数传递数据。这有助于读者理解如何将实际工作负载分配给不同的任务实例。
1.5部分着重于任务优先级的概念,作者提供了一个实验性的例子,指导读者如何调整任务优先级以实现更有效的任务调度。通过实践,开发者可以理解如何平衡不同任务的执行顺序,确保关键任务能在有限的时间内得到响应。
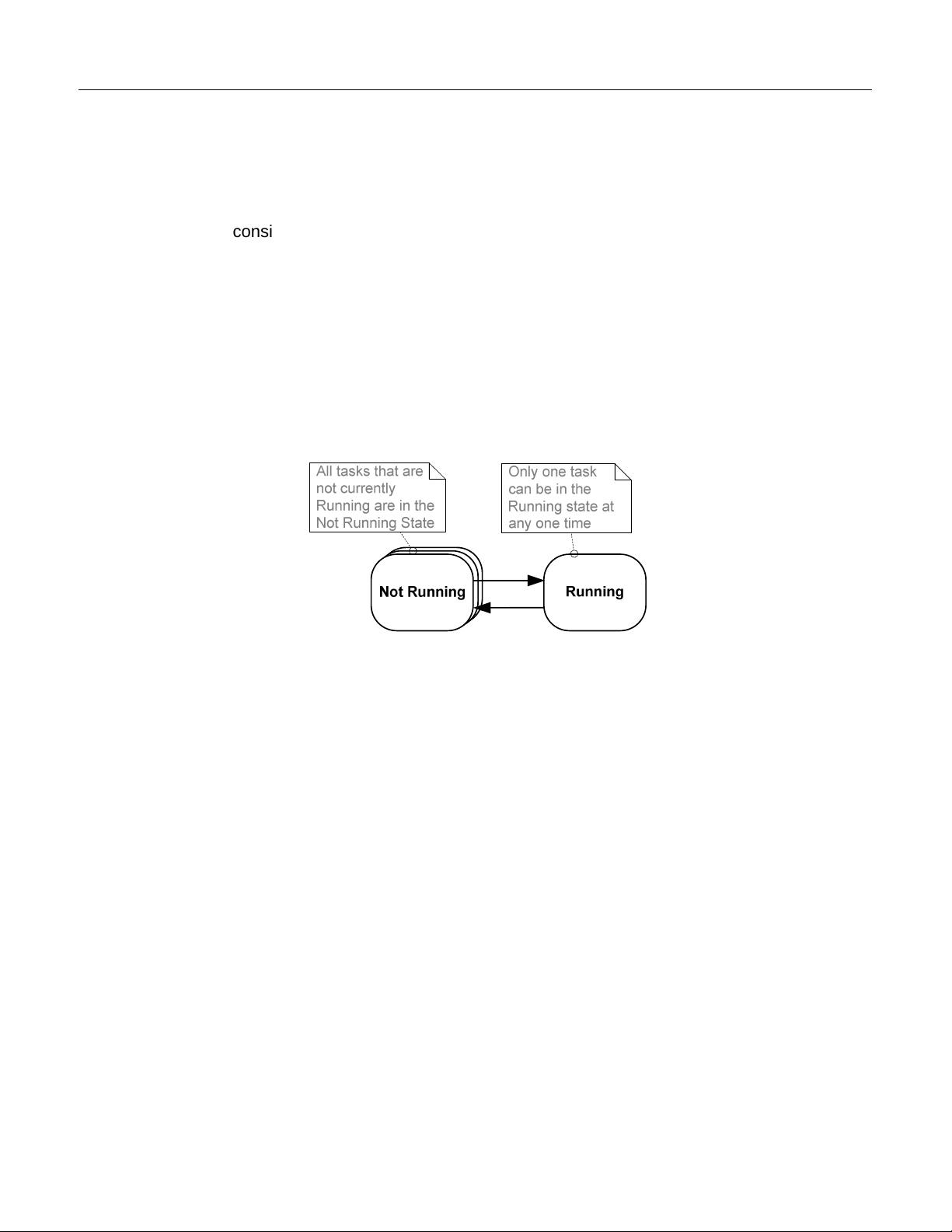
此外,1.6章节探讨了'NotRunning'(阻塞)状态的扩展,即当一个任务因为等待某个条件或资源而暂停时的状态。这里讨论了任务阻塞机制以及如何设计合理的阻塞策略,以避免系统资源的浪费。
这本指南不仅提供了技术细节,还提供了丰富的实战案例,使读者能够快速掌握Freertos在嵌入式多线程环境中的应用,降低开发难度,提高系统的实时性和效率。对于任何希望通过FreeRTOS进行微控制器多任务开发的工程师来说,这本书是不可或缺的参考资料。"

http://www.FreeRTOS.org
FreeRTOS
Designed For Microcontrollers;
3
© 2009 Richard Barry. Distribution or publication in any form is strictly prohibited.
Scope
This chapter aims to give readers a good understanding of:
• How FreeRTOS allocates processing time to each task within an application.
• How FreeRTOS chooses which task should execute at any given time.
• How the relative priority of each task affects system behavior.
• The states that a task can exist in.
In addition readers will hopefully gain a good understanding of:
• How to implement tasks.
• How to create one or more instances of a task.
• How to use the task parameter.
• How to change the priority of a task that has already been created.
• How to delete a task.
• How to implement periodic processing.
• When the idle task will execute and how it can be used.
The concepts presented in this chapter are fundamental to understanding how to use FreeRTOS and
how FreeRTOS applications behave – this is therefore the most detailed chapter in the book.



剩余162页未读,继续阅读
2014-05-12 上传
2018-12-30 上传
2022-12-01 上传
点击了解资源详情
点击了解资源详情
2023-07-27 上传
2023-05-23 上传
2023-08-13 上传

qq_26302861
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB新功能:Multi-frame ViewRGB制作彩色图阴影
- XKCD Substitutions 3-crx插件:创新的网页文字替换工具
- Python实现8位等离子效果开源项目plasma.py解读
- 维护商店移动应用:基于PhoneGap的移动API应用
- Laravel-Admin的Redis Manager扩展使用教程
- Jekyll代理主题使用指南及文件结构解析
- cPanel中PHP多版本插件的安装与配置指南
- 深入探讨React和Typescript在Alias kopio游戏中的应用
- node.js OSC服务器实现:Gibber消息转换技术解析
- 体验最新升级版的mdbootstrap pro 6.1.0组件库
- 超市盘点过机系统实现与delphi应用
- Boogle: 探索 Python 编程的 Boggle 仿制品
- C++实现的Physics2D简易2D物理模拟
- 傅里叶级数在分数阶微分积分计算中的应用与实现
- Windows Phone与PhoneGap应用隔离存储文件访问方法
- iso8601-interval-recurrence:掌握ISO8601日期范围与重复间隔检查
