六足爬虫机器人:设计、原理与应用概述
版权申诉
145 浏览量
更新于2024-06-23
收藏 538KB DOC 举报
六足爬虫机器人.doc是一份详细探讨六足机器人设计的文档,主要集中在机械结构、控制系统和实际应用上。章节一介绍了课题的目的和意义,强调了六足爬虫机器人作为行走机器人,其简单结构和高稳定性使其适用于初学者进行研究和实践,特别是对于那些对控制论、机械设计和机械电子基础有一定了解的人来说,是一个理想的入门平台。
第二章着重于机器人的具体设计方案。六足爬虫机器人的设计包括整体结构,如前进步态和转弯步态的运动学原理,以及红外遥控系统的选型。选用的电机类型是微型伺服马达,讨论了其内部结构、工作原理和控制方法,还提到了AT89S51单片机作为控制器,它具有易于理解和编程的特点。
在机械结构设计部分,章节详细描述了六足爬虫机器人的构造,包括各部分的连接方式,如中间腿和主板、后部腿与主板的连接,以及如何通过连杆实现腿部的运动。这部分内容对于理解机器人的机械动作至关重要。
程序设计章节涵盖了红外解码程序、遥控系统的设计以及电机的正反转控制,这些都是实现机器人移动的基础。
最后,文档总结了整个项目,包括致谢和参考文献,还有两个附录分别提供了单片机相关程序和电路连接图,以供读者深入学习和实践。
这份文档提供了从概念到实践的完整流程,旨在帮助读者掌握六足爬虫机器人的设计和制作,适合对机器人技术感兴趣并希望入门的人士。

第 2 章 设计方案
六足爬虫机器人是一个复杂的机械结构,经过网络和书籍的大量查阅,我在
前人设计的基础上改进的这种新型的六足机器人,优点是结构简单成本低廉,能
够广泛应用到比如震后搜救以及个人探险和排雷实验等领域。
2.1 六足爬虫机器人的总体结构设计
该六足机器人是由一个主板和六条金属腿组成,上部有红外线接收装置和单
片机系统,以及动力源---电池,下部由电机和支架组成。
整个运动是由遥控器发出红外学号,机器人通过红外接收器接收倒红外信号
后,对信号进行解码,并以存储的代码进行比较,确定指令的含义,后可以实现
前进、后退、左转、右转及发声等功能。控制系统我使用的是 AT89S51 单片机,
编程语言使用的是汇编语言,动力系统使用的是微型伺服马达,能源系统使用的
是 9V 电池。
2.2 六足爬虫机器人的运动学原理
我设计的六足爬虫机器人的步态原理如下,这运用了六足机器人特有的行走
步态:六足机器人的行走步态主要有几种方式:四足支撑式、三足支撑式、自由
度机械臂(前后行走)、自由度机械臂(横向行走),我设计的是三足支撑式的六
足机器人,通过制作的带有轨道的加工件,实现机器人的行走。
2.2.1 前进步态
为了更好的体现六足机器人的爬行过程,下面我会以前进步态为例详细描述。
首先,在初始阶段,中间一侧的腿受到了中部电机所连接的连杆的推力,向
外侧绕轴移动了一小段距离,由于是类似于圆周运动,在垂直方向上该金属臂将
离开地面一小段距离,与此同时,由于连接杆连接两条中部金属臂,所以另外一
侧的金属臂必将给地面一个向下的作用力,支撑此一侧的前后摆臂离开地面如图
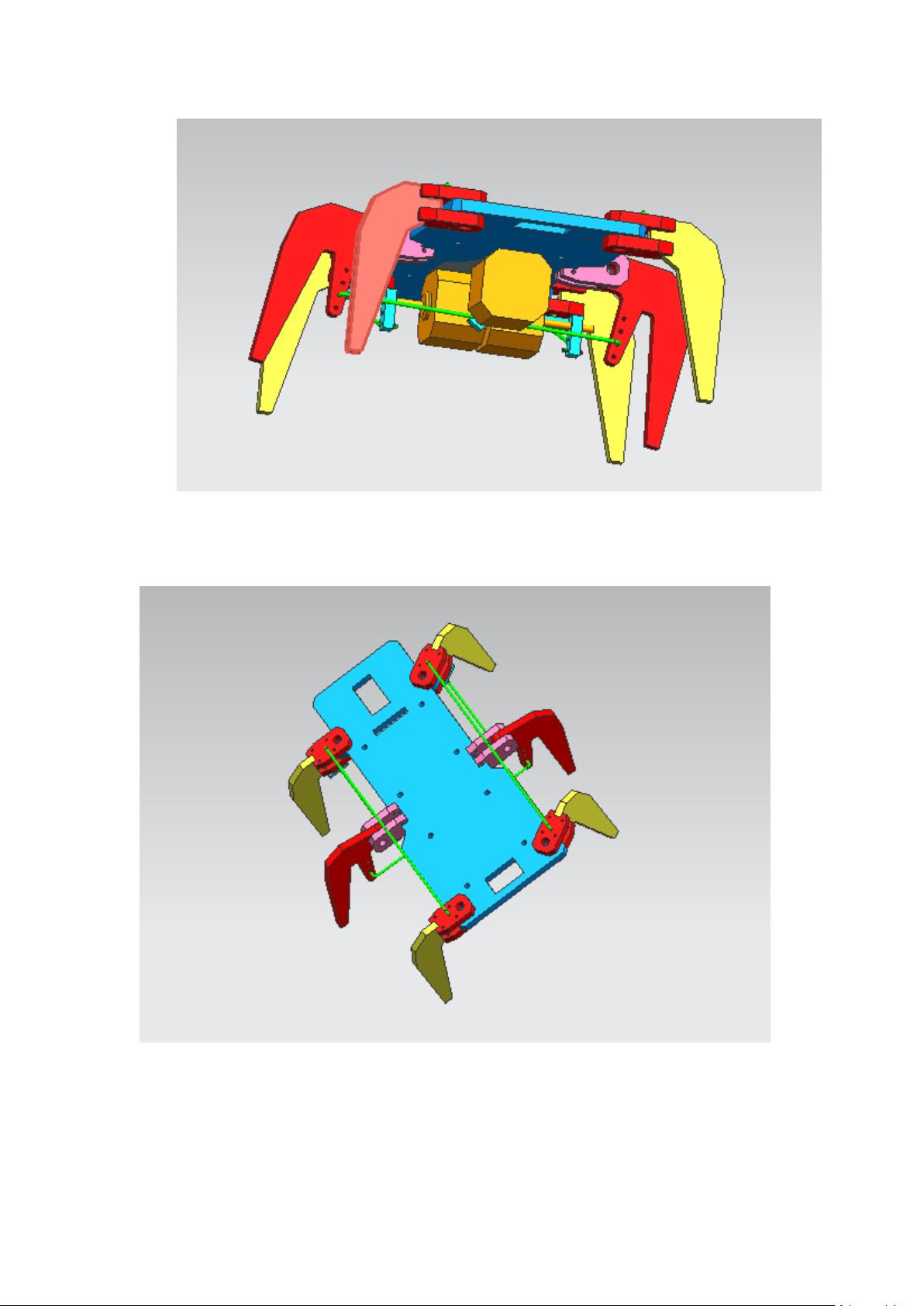
剩余32页未读,继续阅读
2023-07-15 上传
2023-07-12 上传
2023-07-02 上传
2023-07-15 上传
2022-07-08 上传
2022-09-23 上传

omyligaga
- 粉丝: 87
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Android圆角进度条控件的设计与应用
- mui框架实现带侧边栏的响应式布局
- Android仿知乎横线直线进度条实现教程
- SSM选课系统实现:Spring+SpringMVC+MyBatis源码剖析
- 使用JavaScript开发的流星待办事项应用
- Google Code Jam 2015竞赛回顾与Java编程实践
- Angular 2与NW.js集成:通过Webpack和Gulp构建环境详解
- OneDayTripPlanner:数字化城市旅游活动规划助手
- TinySTM 轻量级原子操作库的详细介绍与安装指南
- 模拟PHP序列化:JavaScript实现序列化与反序列化技术
- ***进销存系统全面功能介绍与开发指南
- 掌握Clojure命名空间的正确重新加载技巧
- 免费获取VMD模态分解Matlab源代码与案例数据
- BuglyEasyToUnity最新更新优化:简化Unity开发者接入流程
- Android学生俱乐部项目任务2解析与实践
- 掌握Elixir语言构建高效分布式网络爬虫
