激光雷达语义SLAM:SuMa++在动态环境中的精确建图
需积分: 50 27 浏览量
更新于2024-08-05
收藏 1.31MB DOCX 举报
本文档主要探讨的是SuMa++,一种基于雷达的语义SLAM(Simultaneous Localization and Mapping,同时定位和建图)方法,专注于在复杂的动态环境中实现可靠的定位和建图。传统的SLAM任务侧重于几何信息,但作者认识到语义信息在智能导航中的重要性,特别是在存在大量移动对象的场景中,如城市街道、乡村道路和高速公路。
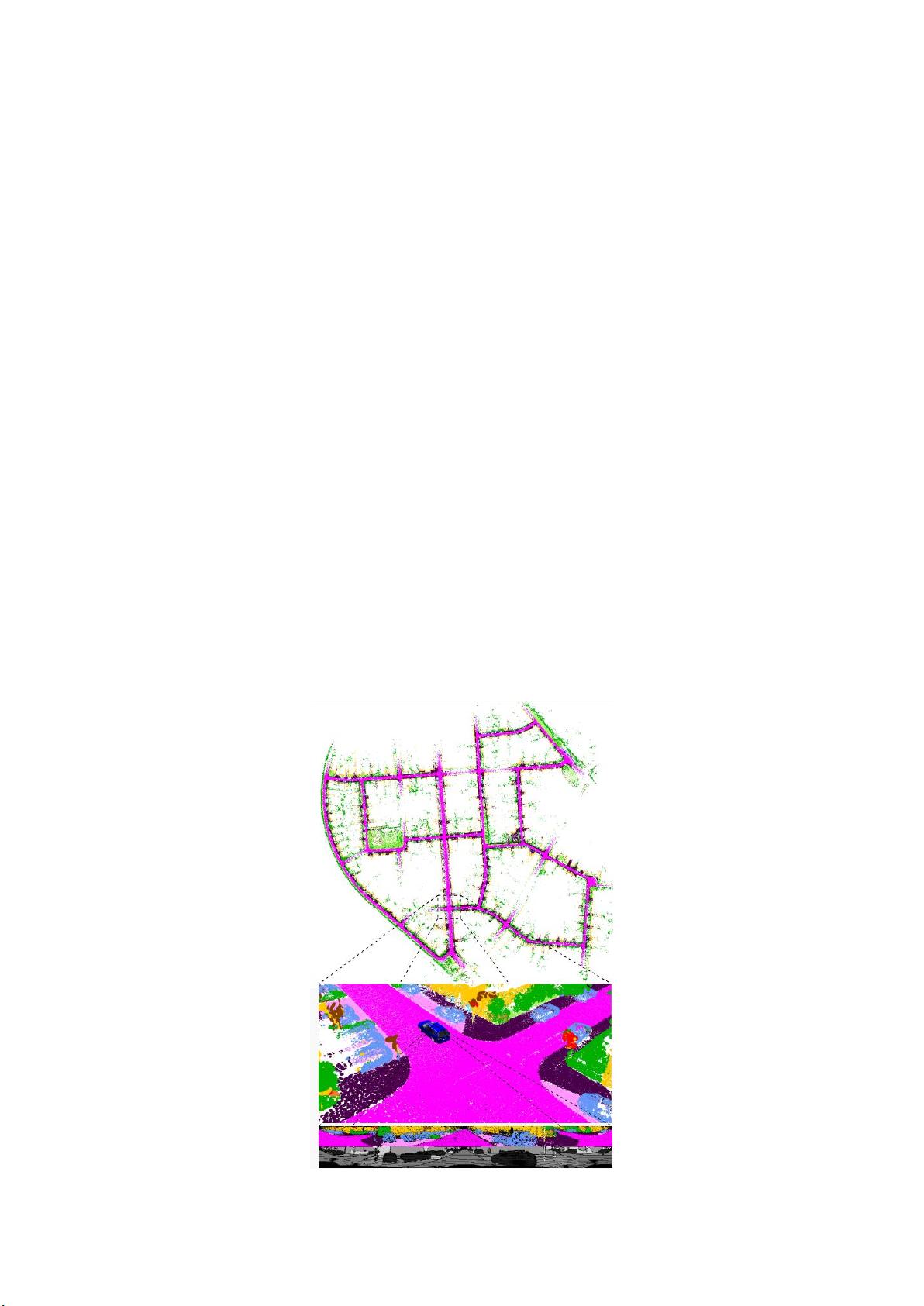
SuMa++的核心创新在于利用全卷积神经网络(FCN),特别是FCNRangeNet++,对三维激光雷达数据进行语义分割。通过球面投影技术,FCN对每个激光扫描点分配语义标签,如行人、车辆、障碍物等。这些标签不仅增强了地图的丰富度,还能帮助过滤掉动态物体,减少误匹配,提高定位和地图构建的准确性。
论文的方法分为两个关键步骤:首先,通过SuMa的顶点建图技术,将实时激光雷达数据转换为球面投影,形成初始的几何地图。接着,FCN的输出被整合到这个地图中,形成带有语义标签的面元地图。动态物体的去除是通过在新的观测和世界模型之间应用语义一致性检测来实现的,这有助于保持地图的静态背景,防止动态元素的误建模。
实验部分展示了SuMa++在KITTI数据集上的高速公路序列中,相比于纯几何的SLAM方法,其在处理动态环境下的优越性。结果显示,语义SLAM能更准确地构建地图,尤其是在动态场景下,显著提升了导航系统的整体性能。
总结来说,这篇论文的贡献在于提出了一种有效融合语义信息的SLAM算法,通过利用深度学习技术和语义一致性检测,改进了传统SLAM在动态环境中的鲁棒性和精度。这种方法对于开发能在复杂现实环境中自主导航的系统具有重要意义。
SuMa++:基于激光雷达的语义 SLAM
1. 摘要
可靠准确的定位和建图是大多数自主系统的关键组成部分。除了地图环境
的几何信息外,语义对智能导航行为的实现也起着重要作用。在大多数现实环
境中,由于移动对象引起的动态会导致这个任务特别复杂。文中提出了一种基
于表面的建图方法的扩展,利用三维激光扫描集成语义信息来促进建图过程。
利用全卷积神经网络(FCN)有效地提取语义信息,并在激光数据的球面投影
上进行渲染。这种计算的语义分割结果为整个扫描的点添加标签,允许建立一
个语义丰富的带标签的面元地图。这种语义建图能够可靠地过滤运动目标,同
时也通过语义约束改善了投影扫描匹配。文章对来自 KITTI 数据集的高速公路
序列的实验评估显示,与纯几何的、最先进的方法相比,该语义 SLAM 方法具
有明显优势。
下载后可阅读完整内容,剩余9页未读,立即下载
2021-04-29 上传
2022-12-01 上传
2023-11-07 上传
2021-02-08 上传
2023-03-13 上传
2024-02-05 上传
2021-02-04 上传
2019-04-11 上传
2022-07-14 上传

梦在北灬
- 粉丝: 16
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 黑板风格计算机毕业答辩PPT模板下载
- CodeSandbox实现ListView快速创建指南
- Node.js脚本实现WXR文件到Postgres数据库帖子导入
- 清新简约创意三角毕业论文答辩PPT模板
- DISCORD-JS-CRUD:提升 Discord 机器人开发体验
- Node.js v4.3.2版本Linux ARM64平台运行时环境发布
- SQLight:C++11编写的轻量级MySQL客户端
- 计算机专业毕业论文答辩PPT模板
- Wireshark网络抓包工具的使用与数据包解析
- Wild Match Map: JavaScript中实现通配符映射与事件绑定
- 毕业答辩利器:蝶恋花毕业设计PPT模板
- Node.js深度解析:高性能Web服务器与实时应用构建
- 掌握深度图技术:游戏开发中的绚丽应用案例
- Dart语言的HTTP扩展包功能详解
- MoonMaker: 投资组合加固神器,助力$GME投资者登月
- 计算机毕业设计答辩PPT模板下载
