西门子S7-200 PID编程指南:从基础到自整定
下载需积分: 9 | DOC格式 | 1.4MB |
更新于2024-07-17
| 200 浏览量 | 举报
本文详细探讨了西门子S7-200系列PLC中的PID(比例-积分-微分)控制算法,旨在帮助初学者理解和应用这一自动化控制系统中至关重要的功能。S7-200的PID控制是通过PID指令功能块来实现的,根据设定值和实际反馈值的差异,计算出相应的控制输出,以维持系统的稳定性。
1. PID的实现方式及数目
S7-200提供了多种PID实现方式:
- PID指令块:使用一个PID回路表交换数据,输入和输出范围限定在0.0-1.0之间,代表百分比值。
- PID向导:简化输入/输出信号的转换和标准化,同时自动调用PID指令。
- 自定义编程:用户可以根据PID算法自行编写,但需考虑CPU资源和扫描周期。
2. PID指令块实现PID
在此方法中,需要配置PID回路表,设置参数如比例(P)、积分(I)和微分(D)增益,以适应特定控制任务。
3. 向导实现PID
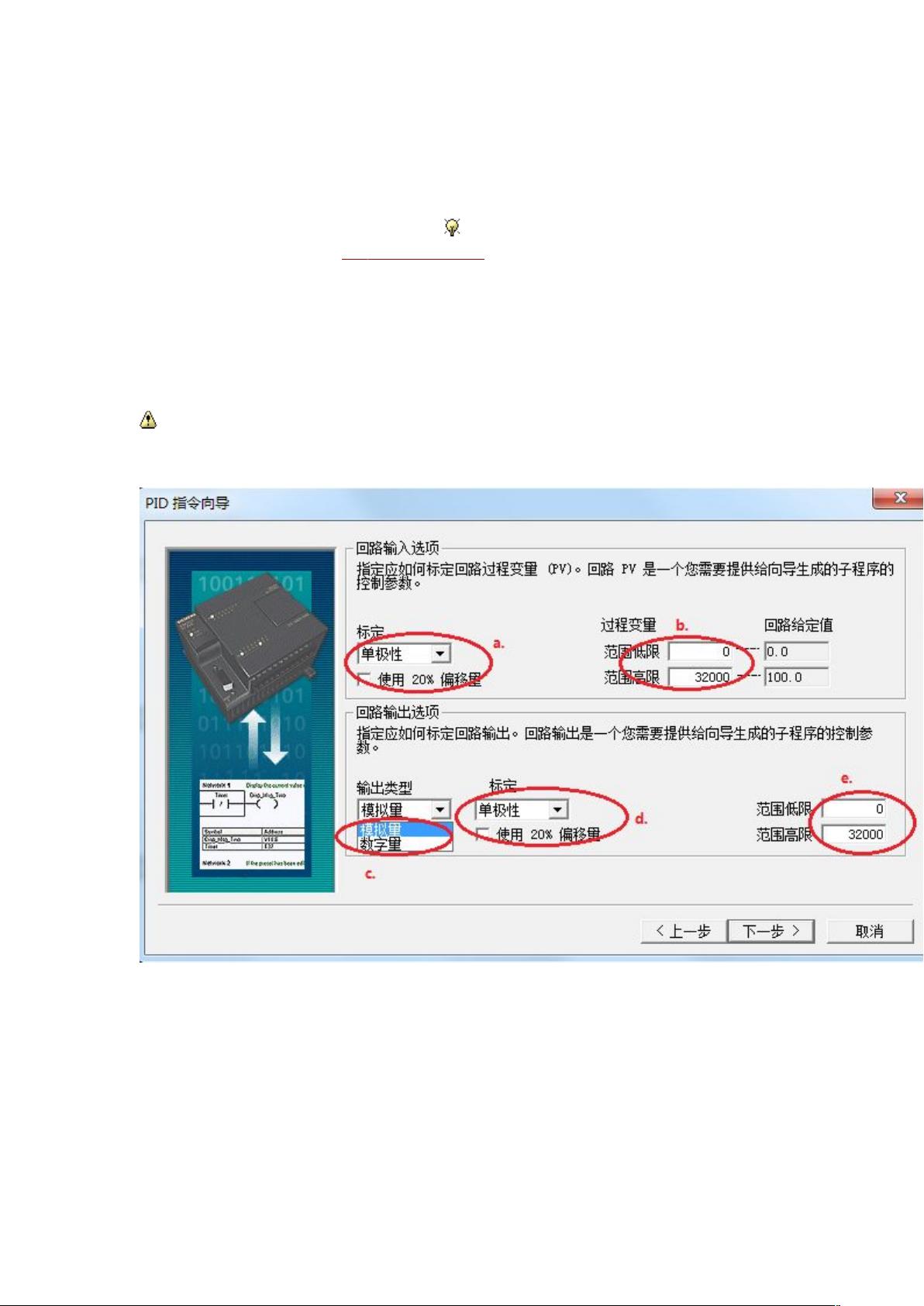
PID向导简化了配置过程,指导用户进行步骤设置,生成相应的程序组件,并提供PID设定值与过程变量的量程设置。控制面板允许实时监控和调整PID参数。
4. PID调节
- 手/自动无扰动切换:确保在切换控制模式时,系统能够平滑过渡,避免输出跳跃。
- PID调节步骤:包括初始化、手动调节、自动运行等阶段,以达到稳定控制。
- 手动调节:在手动模式下,用户可以直接调整PID参数观察系统响应,直至找到合适的控制参数。
5. PID自整定
- 自整定功能通过分析系统响应,自动计算最优PID参数。
- 自整定的启动可选择控制面板或编程方式,但需满足一定的先决条件,例如系统稳定、无扰动。
- 自整定失败可能的原因包括系统不稳定、设定值频繁变动等。
6. 扩展阅读
探讨了PID控制在实际应用中的扩展话题,如如何处理常见问题,以及进一步深入学习的资料推荐。
S7-200的PID控制提供了丰富的工具和灵活性,以适应不同工业应用场景的需求。无论是初学者还是经验丰富的工程师,都能借助这些资源有效地实现和优化闭环控制系统。
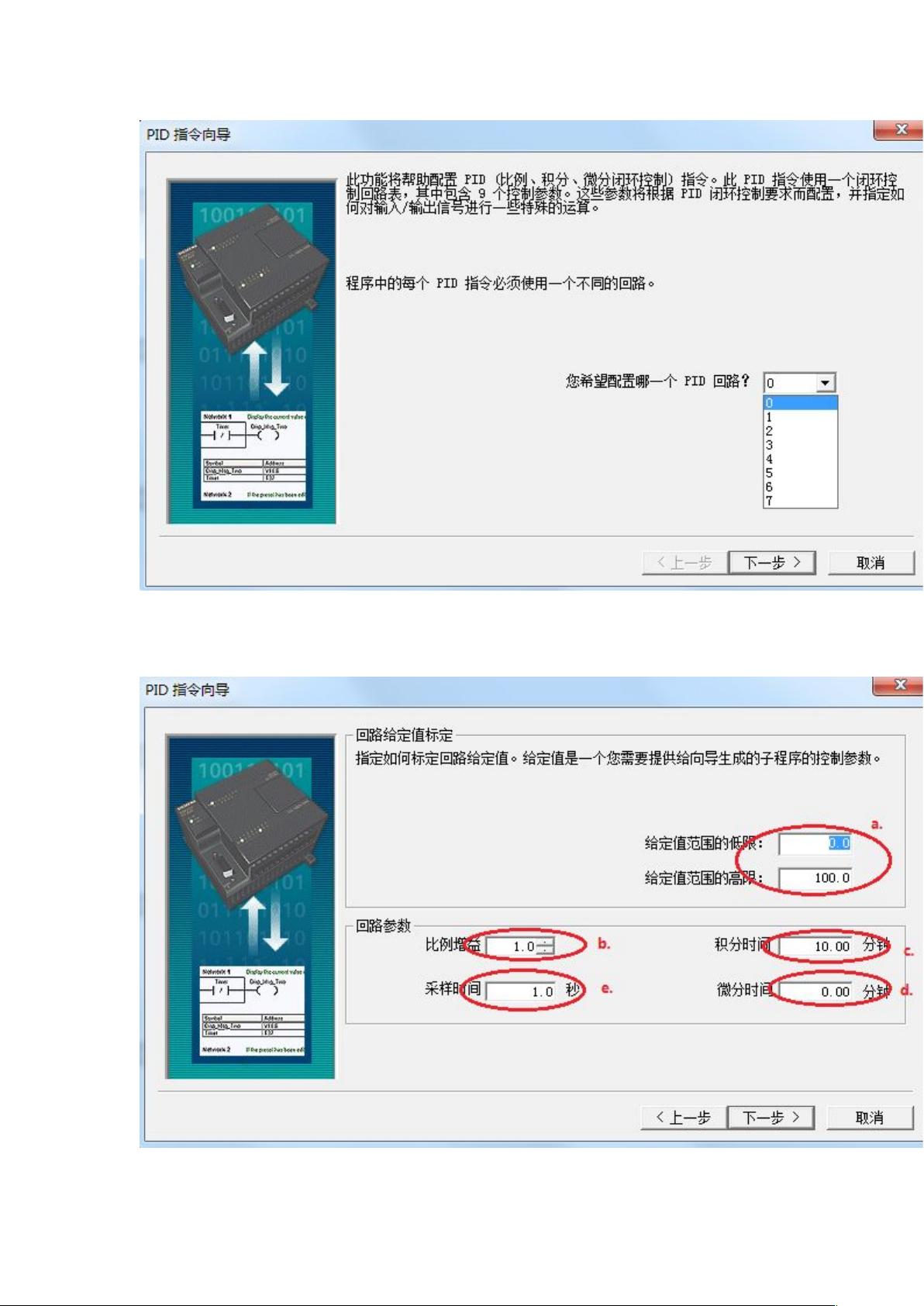
图 3.1.1. 选择 PID 回路号
第二步:设定 PID 回路参数
图 3.1.2. 设置 PID 参数
剩余40页未读,继续阅读
相关推荐





w461149386
- 粉丝: 14
- 资源: 124
 我的内容管理
展开
我的内容管理
展开







