




PID控制器与工业过程动态特性分析
需积分: 50 176 浏览量
更新于2024-07-11
收藏 374KB PPT 举报
"工业过程动态特性的特点及PID调节原理"
工业过程动态特性的特点主要体现在以下几个方面:
1. 非振荡性:在工业过程中,对象的动态特性表现为阶跃响应是单调曲线,意味着被调量在受到干扰或设定值改变时,其变化过程平缓且不会出现振荡。这与一些快速响应、振荡明显的系统形成对比。
2. 幅频和相频特性:工业对象的幅频特性M(ω)和相频特性φ(ω)随频率的增加而呈下降趋势。这表明在高频率下,系统的响应速度会减慢,对高频扰动的抑制能力减弱。
3. 延迟现象:工业过程中的控制通常伴随着延迟,这可能是由于物料流动、热传递等物理过程的固有特性导致。容积延迟和传输延迟是常见的延迟类型,它们会影响控制效果的即时性。
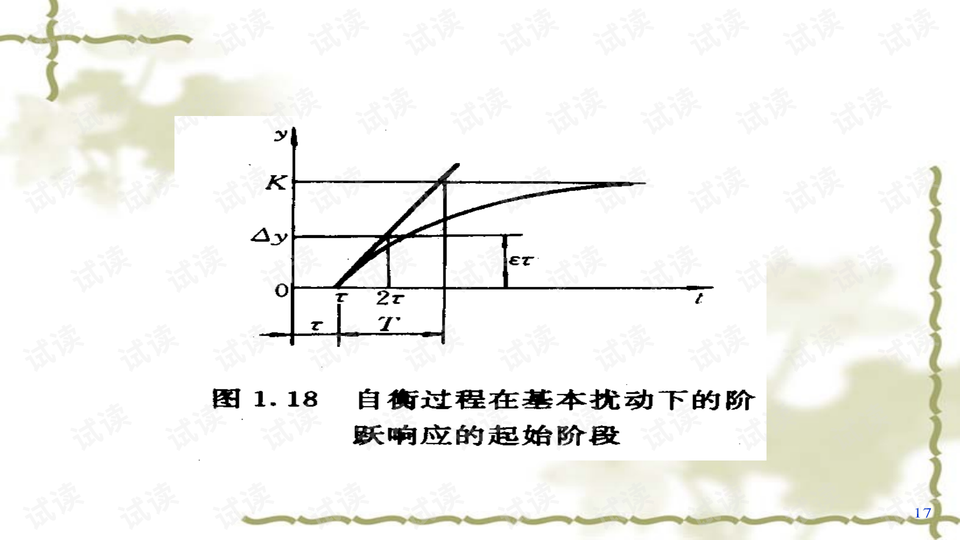
4. 自平衡能力:许多工业对象在平衡关系被破坏后,能够通过自身机制逐渐恢复平衡,即被调量能够稳定在新的水平上。自平衡率是衡量这一能力的指标,等于对象静态增益K的倒数。
PID(比例积分微分)调节原理是控制工程中最基础且广泛应用的控制方式。它的核心优点包括:
- 简单易用:PID控制器的结构简单,易于理解和实现。
- 适应性强:可以应对各种不同类型的工业对象,对对象特性的变化具有一定的鲁棒性。
- 控制品质稳定:即使面对对象特性的变化,也能保持较好的控制效果,确保系统的稳定性。
在反馈控制系统中,PID控制器与被控对象构成闭环,通过负反馈机制来调整控制输出,以减少被控量与设定值之间的偏差。正反馈会导致系统不稳定,而负反馈则有助于系统的稳定控制。在动态过程中,系统会经历从一个稳态到另一个稳态的过渡过程,这个过程的质量可以通过稳定性、准确性和快速性等指标来评估。
在设计控制系统的实践中,工艺工程师会提出具体控制需求,而控制工程师则负责设计合适的PID控制器来满足这些需求,以确保工业过程的自动化控制能够达到预期效果。对于具有延迟和非振荡特性的工业对象,PID控制器需要通过适当的参数整定来优化其性能,以适应这些特性并提高控制精度和响应速度。

105 浏览量
603 浏览量
133 浏览量
2021-05-24 上传
281 浏览量
2014-02-27 上传
292 浏览量
148 浏览量

速本
- 粉丝: 22
 我的内容管理
展开
我的内容管理
展开








最新资源
- Delphi编程实现获取MAC地址教程
- 轻松部署:简单易用的代理服务器软件指南
- 专业U盘数据恢复工具—轻松恢复格式化或误删文件
- 个人网站的设计与JavaScript应用
- Ext JS初学者必备实用教程指南
- DCS-168E集团电话交换机软件V1.6.8更新发布
- 在Windows上安装和配置MongoDB教程
- PopChar输入特殊字符工具v6.2功能体验与安装教程
- 中型企业高性能数据存储方案对比:IBM TSM vs Symantec NBU6.0
- Direct3D游戏编程入门:源码解析与教程
- Holberton School算法面试准备特训
- 全面分享Java程序设计课后答案
- 轻巧华丽的1MB音乐播放器:AirPlayer使用体验
- ASP.NET实现拆线与柱状图展示及代码教程
- 金融公司java工程师不同级别笔试题解析
- Laravel框架精髓与学习资源:实践中的愉悦与创造力






















