步进电机T型加减速原理与实践
本文主要介绍了步进电机的T型加减速原理及其在单片机控制中的应用,重点关注了加减速过程中的技术要点和注意事项。
步进电机在启动和停止时,为了避免堵转和丢步现象,需要进行加减速处理。T型加减速,又称为梯形加减速,是一种简单的加减速策略,其中加速度在整个加速或减速阶段保持恒定,形成类似梯形的速度变化曲线。这种模式下,加速度随时间的关系表现为阶跃变化,速度和位置同样随时间呈现线性关系。然而,由于加速度的突然变化会产生较高的加加速度,可能导致不必要的振动和能量损失,因此T型加减速更适合于简单定长的送料操作,而不适用于需要精细控制的应用。
在步进电机的T型加减速过程中,通常需要设定四个关键参数:运行步数、加速度、减速度和最大运行速度。这些参数在运行前需要计算好,以便确定合适的控制策略。每接收一个脉冲信号,步进电机将前进一个固定的步距角,如1.8°(对于标准的200步/转电机)。通过细分技术,可以进一步减小步距角,提高定位精度。例如,100细分下,步距角缩小至0.018°。
速度的控制是通过调整脉冲频率来实现的,频率越高,电机速度越快。在单片机如STM32F1中,可以通过定时器来控制脉冲宽度,从而调整频率。匀加速是通过逐渐减少定时器脉冲计数值,匀速则是保持计数值,而匀减速则通过逐渐增加脉冲宽度来实现。例如,当定时器1工作在1MHz,PSC预分频设为72,脉冲计数为100时,电机脉冲频率为10kHz,这意味着1秒内电机运行10K步,若采用32细分驱动,电机大约转动1.5圈。
图2和图3(未提供具体内容)可能展示了T型加减速过程中的速度、加速度和位置与时间的关系图,帮助理解这一过程。
T型加减速是一种实用且简单的步进电机控制方法,但在设计时需注意加速度变化对系统振动的影响,以及确保加减速时间足够,以避免高速旋转时的性能问题。在实际应用中,根据具体需求调整参数,优化控制算法,是实现步进电机精确、平稳运行的关键。
电机的脉冲频率即为 10K,即 1 秒钟运行 10K 步数,按照 32 细分的驱动来说,
即转了大约 1.5 圈。
2
图 2
图 3
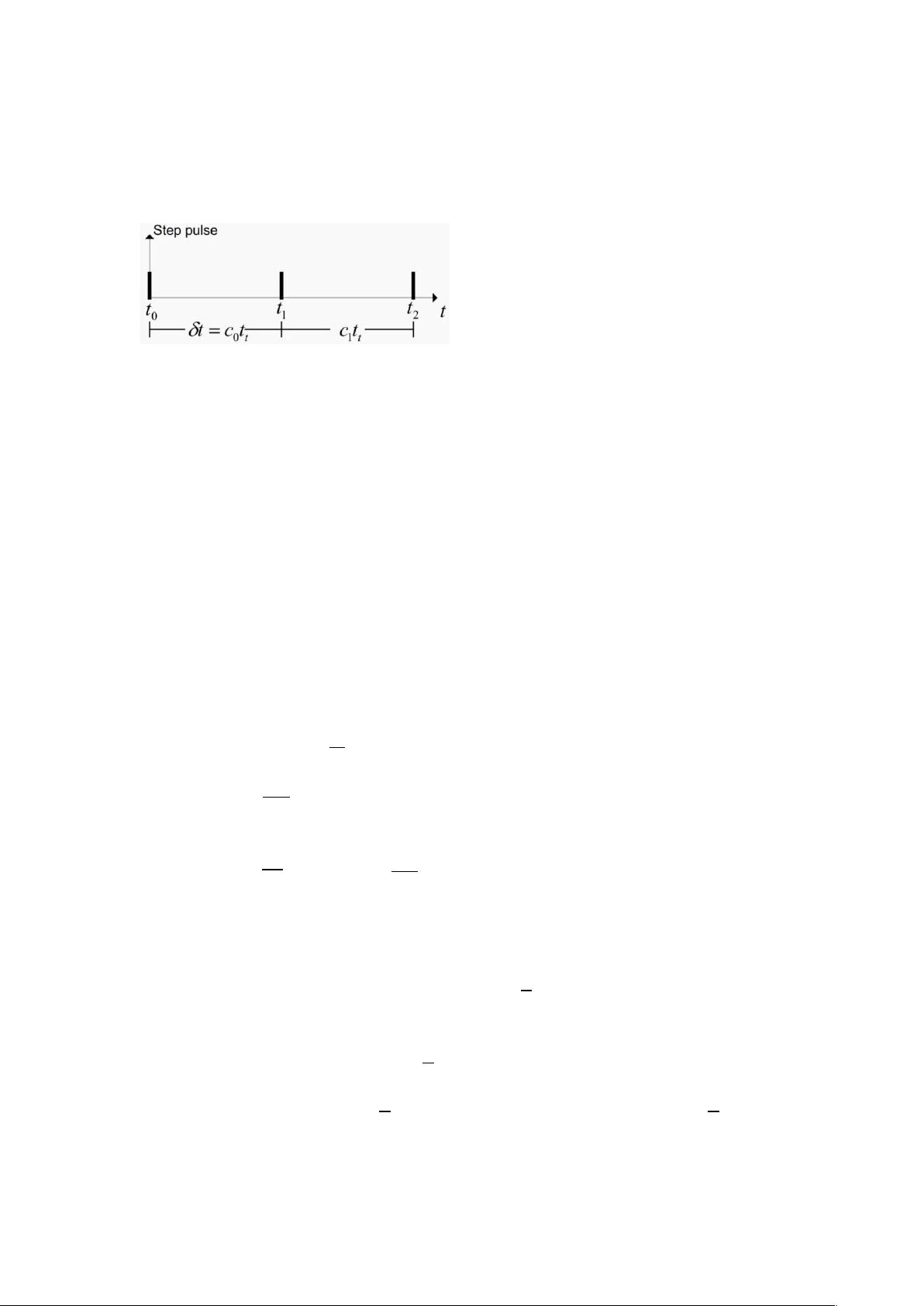
如图 2 所示第一个脉冲的宽度为
t
1
−t
0
=△
t
1
=
c
0
*
t
t
,第二个脉冲宽度为
t
2
−t
1
=△
t
2
=
c
1
*
t
t
其中
c
0
、c
1
为脉冲计数值,
t
t
为定时器计数周期,即定时器计数一次的时长,
t
t
是个固定值,
所以改变定时器的计数值 c 即改变脉冲宽度,也就对应改变速度。
那么问题来了:
1、怎么知道加速过程中每一个脉冲的计数值 c,例如开始时的 c,最大速度时的 c 等是多
少?
2、加速过程需要多少个脉冲完成,减速又什么时候开始,需要多少脉冲?
首先有如下固定的几个参数公式:
1、脉冲间隔:Δt = c
t
t
=
c
f
t
[S]
2、步距角:
a
=
2 π
spr
[rad(弧度)],spr 为转一圈需要的脉冲数,1.8°32 细分即 6400
3、位置:θ = n
a
[rad]
4、角速度:ω =
a
Δt
[rad/sec] =
a f
t
c
[rad/sec]
已知对加速度积分得到速度,对于速度积分得到位置,所以有如下关系:
ω(t)=
∫
˙
ωdt
=
˙
ωt
θ(t)=
∫
ωdt
=
1
2
˙
ωt
2
已知 θ = n
a
,代入上式得到:
1
2
˙
ωt
2
= n a
也可以根据速度公式 θ(t)=
V
0
t+
1
2
ωt² 的公式,当初速度
V
0
为 0,所以 θ(t)=
1
2
˙
ω
t²=n
a
,
根据该公式可以得运行 n 个脉冲所用的时间 t 的公式:
剩余12页未读,继续阅读
2018-09-06 上传
2024-01-04 上传
2024-05-02 上传
2023-05-16 上传
2023-07-08 上传
2023-04-26 上传
2023-07-08 上传

夜乄歌
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 单片机串口通信仿真与代码实现详解
- LVGL GUI-Guider工具:设计并仿真LVGL界面
- Unity3D魔幻风格游戏UI界面与按钮图标素材详解
- MFC VC++实现串口温度数据显示源代码分析
- JEE培训项目:jee-todolist深度解析
- 74LS138译码器在单片机应用中的实现方法
- Android平台的动物象棋游戏应用开发
- C++系统测试项目:毕业设计与课程实践指南
- WZYAVPlayer:一个适用于iOS的视频播放控件
- ASP实现校园学生信息在线管理系统设计与实践
- 使用node-webkit和AngularJS打造跨平台桌面应用
- C#实现递归绘制圆形的探索
- C++语言项目开发:烟花效果动画实现
- 高效子网掩码计算器:网络工具中的必备应用
- 用Django构建个人博客网站的学习之旅
- SpringBoot微服务搭建与Spring Cloud实践
