CAN总线技术详解:原理、应用与节点结构
需积分: 12 12 浏览量
更新于2024-07-17
收藏 6.7MB PDF 举报
"CAN总线技术基础"
CAN总线技术是一种广泛应用在汽车电子系统中的通信协议,它的全称为“Controller Area Network”,即控制器局域网。CAN总线的主要优点包括高速数据传输(可达1Mbit/s)、强抗干扰能力(通过差分数据线实现)以及自我诊断能力(能够检测并报告错误)。这种技术被设计用来连接车辆中的不同控制器,减少线束复杂性,实现信息的高效共享。
在CAN总线系统中,每个控制器视为一个独立的网络节点,它们可以通过CAN总线进行双向通信。CAN总线的工作原理类似会议讨论,采用多主通信模式,任何节点都能发起通信,通过仲裁机制决定哪个节点有权限发送数据。仲裁过程基于报文的标识符(ID),ID数值越小,优先级越高。一旦节点获得发言权,它就开始发送数据,其他节点则进行监听和反馈,以确保数据正确无误地传输。
CAN总线网络结构分为物理层、数据链路层和应用层。物理层负责信号电平和抗干扰处理,数据链路层处理位定时、同步、编码解码以及总线仲裁,应用层则涉及具体的应用协议和报文打包。CAN报文帧结构包括帧起始、仲裁、数据、错误检测、应答和帧结尾等部分,用于确保数据的完整性和正确性。此外,CAN总线还具备位填充机制,防止连续相同位的出现,增加抗干扰能力。
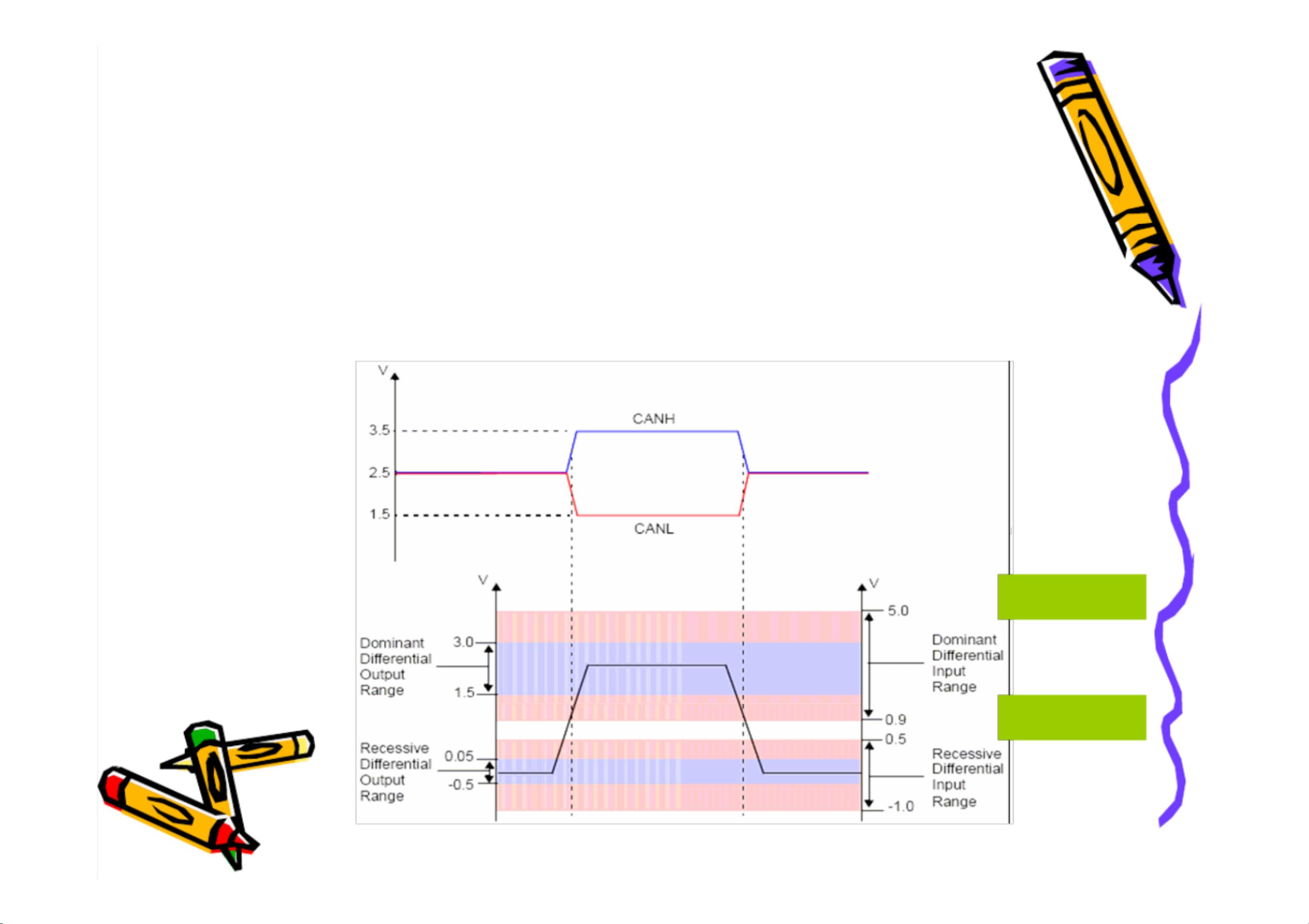
CAN总线上的电平分为显性和隐性两种,分别对应逻辑0和逻辑1,其电压值由CAN_H和CAN_L两条线的相对电平定义。总线空闲时,电平为2.5V;数据传输时,显性电平为3.5V/1.5V,隐性电平为2.5V/2.5V。
CAN总线网络中的节点通常包括单片机、总线控制器和总线收发器。总线收发器是关键组件,它能将单片机的逻辑电平转换为CAN总线规定的电平,同时具备反馈功能,确保通信的可靠性。根据BOSCH CAN总线标准,总线上支持的最大节点数目由所选用的驱动芯片决定,通常能够满足汽车内多个控制器的需求。
J1939协议是CAN总线在重型车辆和商用车辆中的应用,它对29位的标识符进行了分类,建立了详细的组织架构,使得系统内的通信更加有序。在实际应用中,理解J1939协议并进行协议查找是进行CAN总线通信设计的重要步骤。CAN总线技术因其高效、可靠的特性,在现代汽车电子系统中扮演着至关重要的角色。
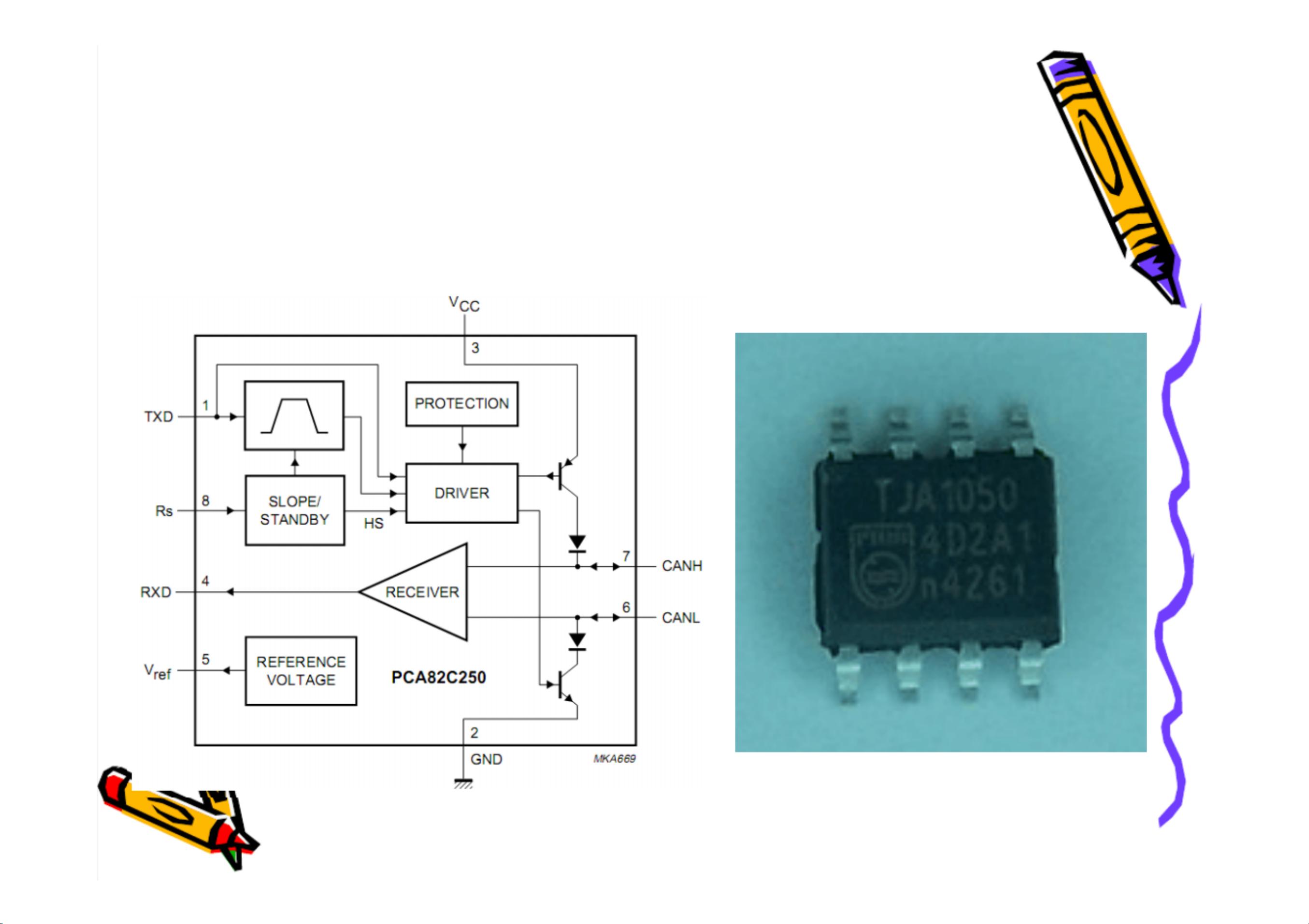
何为 CAN 收发器?
按照BOSCH CAN 总线标准将 0或1逻辑信号转换为
标准中规定的电平,同时有反馈功能
剩余44页未读,继续阅读
2021-03-28 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

fly-99
- 粉丝: 1
- 资源: 10
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular程序高效加载与展示海量Excel数据技巧
- Argos客户端开发流程及Vue配置指南
- 基于源码的PHP Webshell审查工具介绍
- Mina任务部署Rpush教程与实践指南
- 密歇根大学主题新标签页壁纸与多功能扩展
- Golang编程入门:基础代码学习教程
- Aplysia吸引子分析MATLAB代码套件解读
- 程序性竞争问题解决实践指南
- lyra: Rust语言实现的特征提取POC功能
- Chrome扩展:NBA全明星新标签壁纸
- 探索通用Lisp用户空间文件系统clufs_0.7
- dheap: Haxe实现的高效D-ary堆算法
- 利用BladeRF实现简易VNA频率响应分析工具
- 深度解析Amazon SQS在C#中的应用实践
- 正义联盟计划管理系统:udemy-heroes-demo-09
- JavaScript语法jsonpointer替代实现介绍
