51单片机驱动三相六拍步进电机:简单教程与ULN2003应用
下载需积分: 9 | PDF格式 | 435KB |
更新于2024-11-01
| 137 浏览量 | 举报
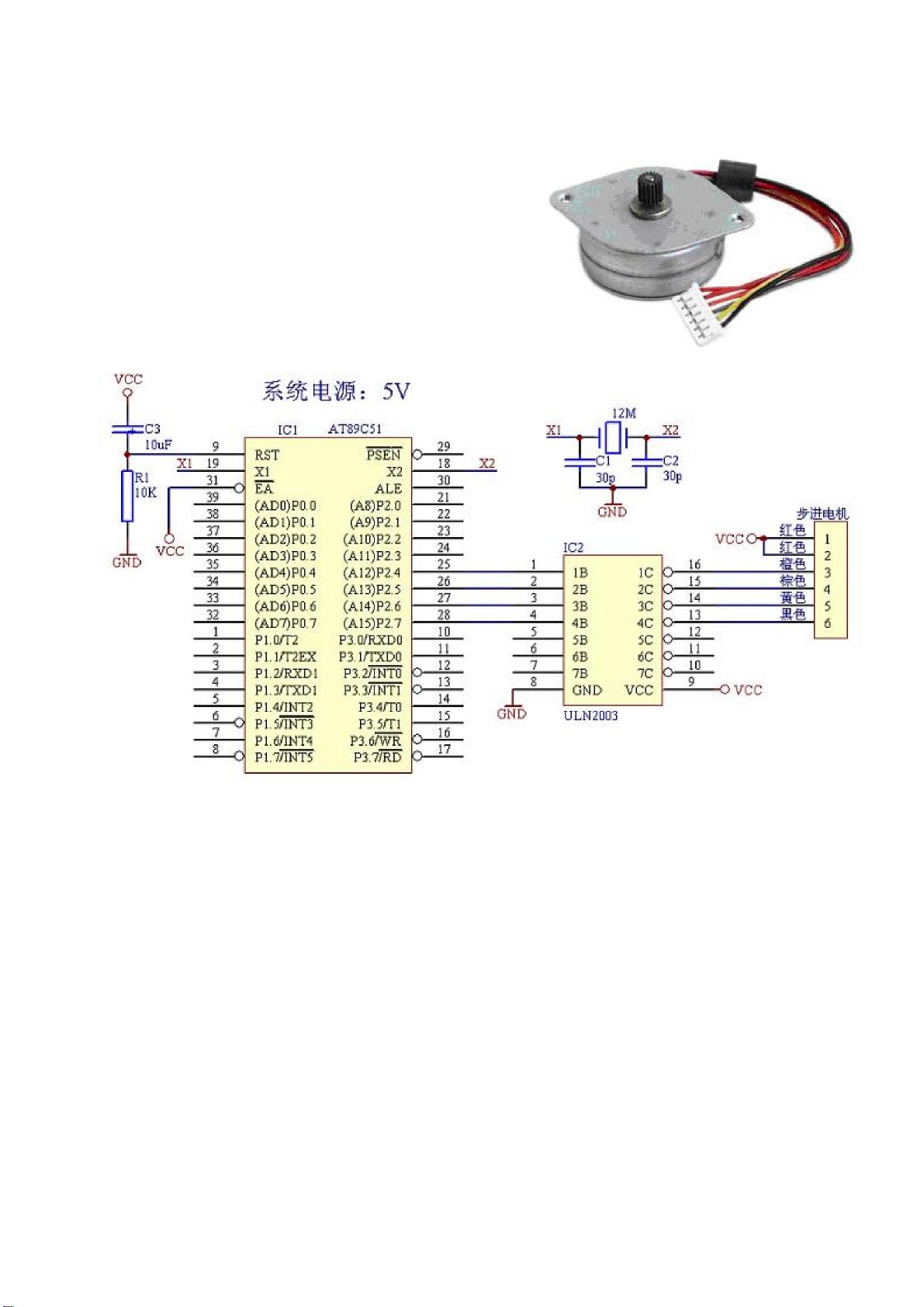
在本文中,我们将探讨如何使用AT89S51单片机来精确地控制三相六拍步进电机。这种特定步进电机的供电需求为12V,每个步进周期包含7.5度的角度变化,而一个完整的360度旋转则需要48个脉冲。其接线布局包括6根引脚,分别是红色、红色、橙色、棕色、黄色和黑色,分别对应A、B、C、D组线圈。
驱动步进电机的关键在于提供脉冲信号,其频率决定了电机的转动速度。AT89S51单片机通过P2.4、P2.5、P2.6和P2.7这四个端口控制A、B、C和D组线圈,形成正转的步进序列。具体来说,一个脉冲会触发A组和B组线圈接通,接着是B组和C组,然后C组和D组,最后D组回到A组,实现一次7.5度的正向移动。
文章提供了一个示例程序,通过设置定时器来产生脉冲序列。例如,`MOVR3,#144`表示正转3圈,需要执行144个脉冲。程序还使用了`MOV`指令来设置P2端口的值,以触发相应的线圈动作,如`MOV P2,#`0x00H`是启动步骤的一部分。
需要注意的是,虽然文章建议使用单片机系统5V电压驱动ULN2003,但为了获得更好的力矩性能,用户可以根据需要将驱动电压提升至12V。最后,作者强调了驱动信号的脉冲特性,这对于步进电机的精确控制至关重要。
这篇文章深入介绍了利用AT89S51单片机设计步进电机驱动程序的方法,包括脉冲控制原理、接线布局以及实际编程示例,对初学者和工程师来说是一份实用的参考资源。
在这里介绍一下用 51单片机驱动步进电机的方法。(三相
六拍步进电机) 这款步进电机的驱动电压 12V,步进角为
7.5度 . 一圈 360 度 , 需要 48 个脉冲完成!!!
该步进电机有 6根引线,排列次序如下:1:红色、2:红色、
3:橙色、4:棕色、5:黄色、6:黑色。
采用 51驱动 ULN2003的方法进行驱动。
ULN2003的驱动直接用单片机系统的 5V电压,可能力矩不
是很大,大家可自行加大驱动电压到 12V。
*********************************************************************************
****************************步进电机的驱动***************************************
---------------------------------------------------------------------------------
步进电机的驱动信号必须为 脉冲信号!!! 转动的速度和脉冲的频率成正比!!!
本步进电机步进角为 7.5度 . 一圈 360 度 , 需要 48 个脉冲完成!!!
---------------------------------------------------------------------------------
A组线圈对应 P2.4
B组线圈对应 P2.5
C组线圈对应 P2.6
D组线圈对应 P2.7
正转次序: AB组--BC组--CD组--DA组 (即一个脉冲,正转 7.5 度)
----------------------------------------------------------------------------------
Generated by Foxit PDF Creator © Foxit Software
http://www.foxitsoftware.com For evaluation only.
下载后可阅读完整内容,剩余4页未读,立即下载
相关推荐





「已注销」
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- Web远程教学系统需求分析指南
- 禅道6.2版本发布,优化测试流程,提高安全性
- Netty传输层API中文文档及资源包免费下载
- 超凡搜索:引领搜索领域的创新神器
- JavaWeb租房系统实现与代码参考指南
- 老冀文章编辑工具v1.8:文章编辑的自动化解决方案
- MovieLens 1m数据集深度解析:数据库设计与电影属性
- TypeScript实现tca-flip-coins模拟硬币翻转算法
- Directshow实现多路视频采集与传输技术
- 百度editor实现无限制附件上传功能
- C语言二级上机模拟题与VC6.0完整版
- A*算法解决八数码问题:AI领域的经典案例
- Android版SeetaFace JNI程序实现人脸检测与对齐
- 热交换器效率提升技术手册
- WinCE平台CPU占用率精确测试工具介绍
- JavaScript实现的压缩包子算法解读
