机器人控制器远程访问与程序启动指南
需积分: 0 201 浏览量
更新于2024-08-04
收藏 536KB DOCX 举报
"这篇文档是关于机器人控制器的使用说明,主要涵盖了程序架构、远程访问控制器的方法、启动 EtherCAT 服务程序以及机器人运动控制程序的启动,并详细介绍了桌面控制程序的使用,包括示教功能和脚本执行。"
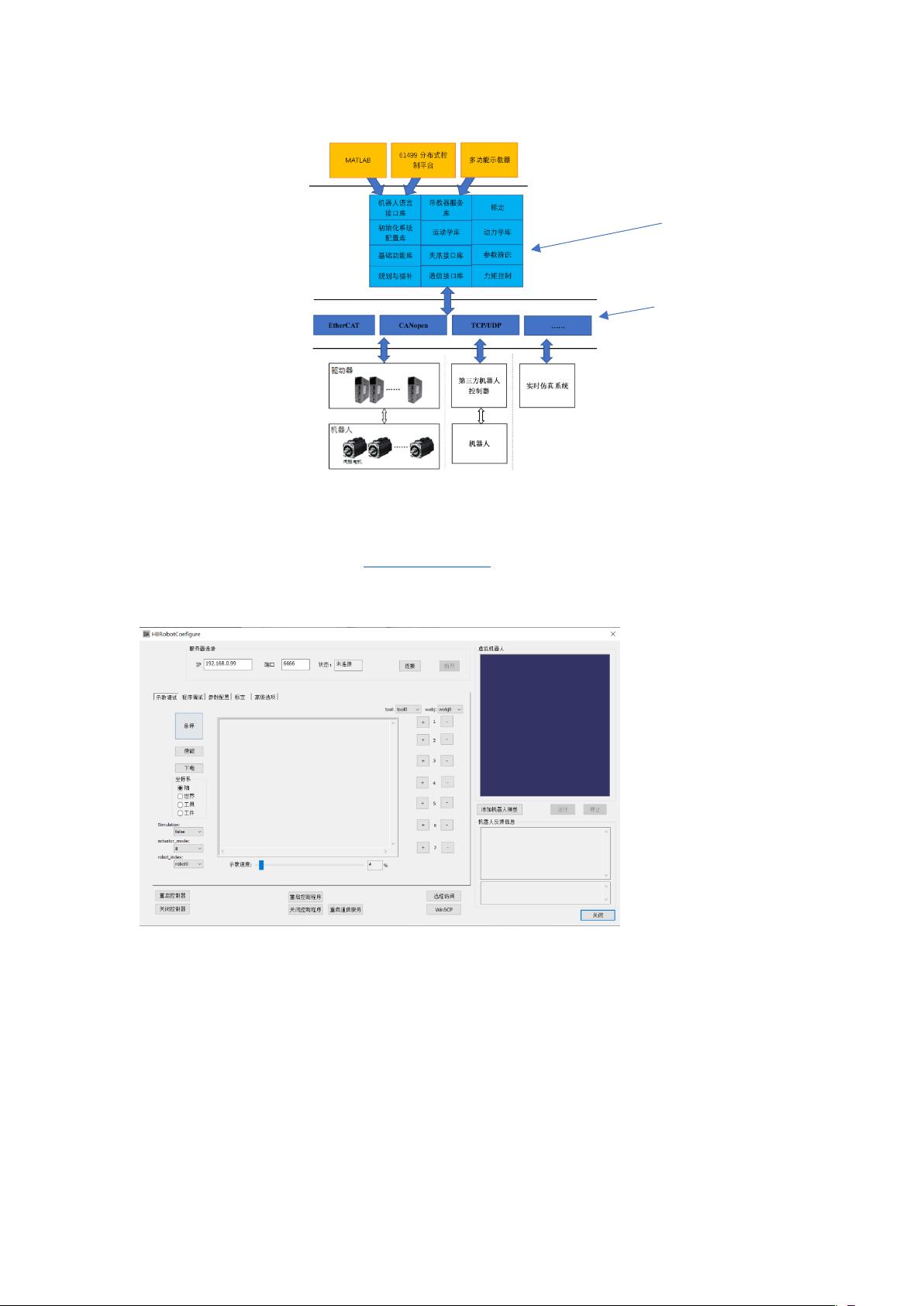
本文档详细阐述了如何操作和管理机器人控制器,特别是针对基于EtherCAT通信的系统。首先,程序架构中提到了 EtherCAT 通信服务程序,这是机器人控制系统的关键部分,用于处理高速、实时的数据传输,确保机器人运动的精确控制。
远程访问控制器的两种方法分别是通过Ubuntu系统的SSH和Windows系统的HBRobotConfigure.exe桌面控制程序。在Ubuntu上,用户可以通过SSH命令行连接到控制器;而在Windows环境下,用户则可以使用提供的桌面应用程序进行远程访问。无论哪种方式,都需要连接到IP地址192.168.0.99,并使用用户名root和密码root进行身份验证。
启动EtherCAT服务程序通常是在驱动器正常通电的情况下自动启动的。如果需要手动启动,可以通过运行位于/opt/ECMworkspace_64文件夹中的runECM.sh脚本,或者使用桌面控制程序的“重启通信服务”功能。若驱动出现异常,需要重启控制柜,随后重启通信服务程序。
机器人运动控制程序的启动依赖于已经运行的EtherCAT服务程序。同样,可以通过命令行或桌面控制程序的“重启控制程序”按钮来启动。如果通信服务程序被重启,机器人运动控制程序也需要重新启动,否则将进入仿真模式。
桌面控制程序提供了丰富的功能,包括连接控制器、添加机器人模型、选择运行模式(仿真或真实),以及控制机器人的使能状态、坐标系选择等。它还支持脚本执行,用户可以输入脚本名称并启动或停止脚本运行,同时记录和使用示教点。这使得用户能够创建和编辑自定义的机器人动作,提升自动化工作的效率和精度。
下载后可阅读完整内容,剩余7页未读,立即下载
106 浏览量
230 浏览量
152 浏览量
749 浏览量
2021-10-07 上传
2024-11-03 上传
445 浏览量
569 浏览量

Crazyanti
- 粉丝: 27
 我的内容管理
展开
我的内容管理
展开







最新资源
- Win7系统下的一键式笔记本显示器关闭解决方案
- 免费替代Visio的流程图软件:DiaPortable
- Polymer 2.0封装的LineUp.js交互式数据可视化库
- Kotlin编写的Linux Shell工具Kash:强大而优雅的命令行体验
- 开源海军贸易模拟《OpenPatrician》重现中世纪北海繁荣
- Oracle 11g 32位客户端安装与链接指南
- 创造js实现的色彩识别小游戏「看你有多色」
- 构建Mortal Kombat Toasty展示组件:Stencil技术揭秘
- 仿驱动之家触屏版手机wap硬件网站模板源码
- babel-plugin-inferno:JSX转InfernoJS vNode插件指南
- 软件开发中编码规范的重要性与命名原则
- 免费进销存软件的两个月试用体验
- 树莓派从A到Z的Linux开发完全指南
- 晚霞天空盒资源下载 - 美丽实用的360度全景贴图
- perfandpubtools:MATLAB性能分析与发布工具集
- WPF圆饼图控件源代码分享:轻量级实现
