ABB工业机器人板卡详细配置教程:DI/DO/DI/O板与PLC连接
版权申诉
本资源是一份详细的ABB工业机器人板卡通讯配置教程,共有19页,主要介绍了工业机器人在通信方面的关键知识点。内容涵盖了以下几个核心部分:
1. IO通讯的种类:ABB机器人提供了丰富的I/O接口,包括数字输入(DI)、数字输出(DO)、模拟输入(AI)、模拟输出(AO),以及用于输送链跟踪的特殊功能。这些接口允许机器人与周边设备无缝连接,提高自动化系统的效率。
2. 标准IO板配置——DSQC652:DSQC652板作为典型的标准IO板,具备16个数字输入和16个数字输出信号处理能力。配置过程中,需要通过ABB主菜单进入控制面板,然后依次选择“配置”>“DeviceNetDevice”等步骤来添加和配置该板卡,如设置地址并重启。
3. 远程IO模块配置:除了DSQC652,还涉及远程IO模块的配置,这部分的操作流程与DSQC652类似,但可能针对不同型号的设备,例如设置不同的参数和命名,确保模块间的正确通信。
4. 配置IO信号:这部分详细解释了如何在ABB机器人的示教器上管理和配置IO信号,包括创建、编辑和保存信号以满足特定的系统需求。
5. 设置机器人的IP地址:机器人网络连接是关键,通过设置适当的IP地址,机器人能够接入工业网络并与上位机或PLC进行通信,实现远程监控和控制。
这份文档对于理解ABB工业机器人的通信架构,尤其是对于维护、编程和调试工程师来说,具有很高的实用价值。学习者可以通过逐页深入理解,掌握如何有效地配置和管理板卡,以确保工业机器人的顺畅运行。
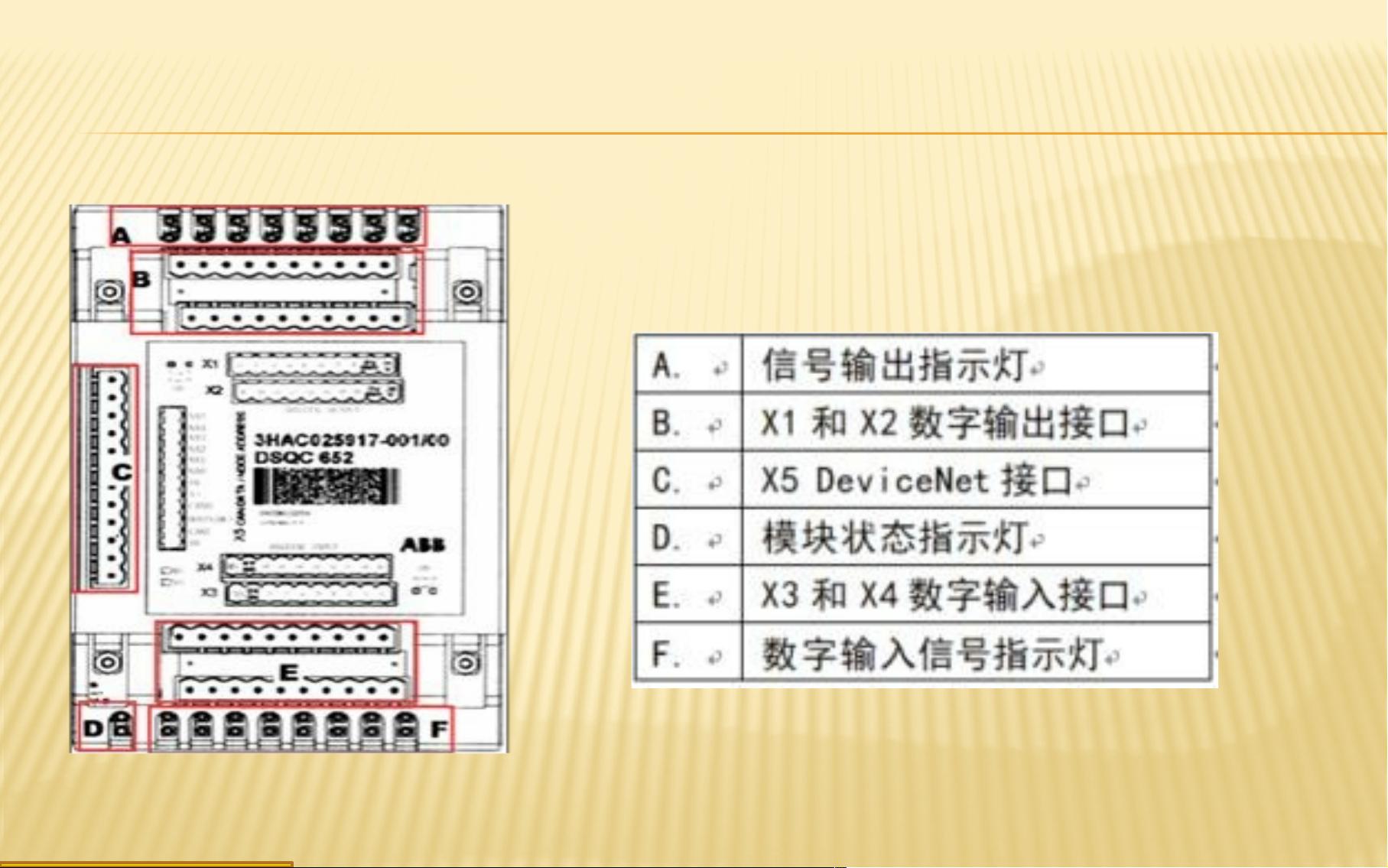
标准IO板配置——DSQC652
DSQC652板,主要提供16个数字输入信号和16个数字输出信号的处
理。
剩余18页未读,继续阅读
522 浏览量
144 浏览量
109 浏览量
2021-10-03 上传
382 浏览量

是空空呀
- 粉丝: 199
- 资源: 3万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- List Issues-crx插件
- lokalise:从lokali.se检索本地化文件的工具
- TP002-控制LED灯翻转.zip
- 监控程序运行进程及系统CPU运行状态异常重启
- AprendeIngles:Proyecto App应用程序
- Mind-Robot:我正在构建一个意念控制机器人,使用 android、arduino 和 Mindwave 耳机
- 2021年毕业设计 (计算机科学与技术专业).zip
- plchdr-kt:Kotlin中的简单占位符生成器
- TP005-按键控制LED灯翻转.zip
- TabMania-crx插件
- librebook:使用Flutter构建的最小前端库创世客户端
- 易语言文件目录管理系统
- auspost:澳大利亚邮政网站库
- API菜单类-易语言
- javascript-technical-documentation:这是有关JavaScript某些方面的简短技术文档。 使用HTML和CSS制作
- 毕业设计.zip
