




微Lie理论在机器人状态估计中的应用简介
下载需积分: 50 | PDF格式 | 1.5MB |
更新于2024-07-04
| 97 浏览量 | 举报
"A micro Lie theory for state estimation in robotics.pdf"
这篇文档主要探讨的是微Lie理论在机器人状态估计中的应用。Lie群是19世纪数学家Sophus Lie提出的连续变换群的理论,它对科学和技术的多个领域产生了深远的影响。在机器人学中,尤其是在导航和运动估计领域,Lie群的运用近年来呈现出显著的趋势。然而,对于大多数机器人学者来说,Lie群的概念相对抽象,理解和应用起来较为困难。
在机器人状态估计中,并不需要深入挖掘Lie理论的所有细节。文档作者旨在通过介绍Lie理论的基本原理,传达清晰且实用的思想,同时保留了Lie理论的重要部分。尽管进行了简化,但包含的材料已被证明对现代机器人估计算法极其有用。
Lie理论的核心概念包括:
1. Lie群:Lie群是一类具有加法结构的连续群,可以理解为集合上的连续变换,比如旋转、平移等。在机器人学中,Lie群常用于描述系统的运动学和动力学,如SE(3)群表示空间中的旋转和平移组合。
2. Lie代数:Lie群的导出结构,是Lie群的局部线性近似。Lie代数可以看作是Lie群元素的切空间,它提供了研究Lie群的工具,特别是通过导数和指数映射来简化计算。
3. Exponential映射与Log映射:Exponential映射将Lie代数元素映射到Lie群,而Log映射则反之。这两个映射在将Lie群操作转换为Lie代数运算时非常关键,因为Lie代数通常比Lie群更容易处理。
4. 状态估计:在机器人学中,状态估计涉及估计机器人的位置、姿态、速度等信息。Lie群和Lie代数提供了一种结构化的方式来描述和融合来自不同传感器的数据,如IMU、GPS和视觉传感器,从而实现更准确的估计。
5. Kalman滤波与EKF(扩展卡尔曼滤波):Lie理论与这些滤波器结合,可以处理非线性问题,特别是在状态更新和测量关联中涉及Lie群操作时。通过将系统模型和观测模型建模为Lie群操作,可以更自然地处理旋转和平移的组合,提高滤波性能。
6. 避免奇异问题:Lie群和Lie代数的结构有助于避免在处理特定姿态(如正交矩阵的奇异情况)时出现的问题,保证了算法的稳定性和有效性。
这份文档为机器人状态估计提供了一个简化的Lie理论框架,使工程师能够更好地理解和应用Lie理论,以解决实际问题,特别是在复杂的动态环境中进行精确导航和定位。
4
Table I
TYPICAL LIE GROUPS USED IN 2D AND 3D MOTION, INCLUDING THE TRIVIAL R
n
. SEE THE APPENDICES FOR FULL REFERENCE
Lie group M, ◦ size dim X ∈ M Constraint τ
∧
∈ m τ ∈ R
m
Exp(τ ) Comp. Action
n-D vector R
n
, + n n v ∈ R
n
v − v = 0 v ∈ R
n
v ∈ R
n
v = exp(v) v
1
+v
2
v + x
circle S
1
, · 2 1 z ∈ C z
∗
z = 1 iθ ∈ iR θ ∈ R z = exp(iθ) z
1
z
2
z x
Rotation SO(2), · 4 1 R R
>
R = I [θ]
×
∈ so(2) θ ∈ R R = exp([θ]
×
) R
1
R
2
R x
Rigid motion SE(2), · 9 3 M =
R t
0 1
R
>
R = I
h
[θ]
×
ρ
0 0
i
∈ se(2)
ρ
θ
∈ R
3
exp
h
[θ]
×
ρ
0 0
i
M
1
M
2
R x+t
3-sphere S
3
, · 4 3 q ∈ H q
∗
q = 1 θ/2 ∈ H
p
θ ∈ R
3
q = exp(uθ/2) q
1
q
2
q x q
∗
Rotation SO(3), · 9 3 R R
>
R = I [θ]
×
∈ so(3) θ ∈ R
3
R = exp([θ]
×
) R
1
R
2
R x
Rigid motion SE(3), · 16 6 M =
R t
0 1
R
>
R = I
h
[θ]
×
ρ
0 0
i
∈ se(3)
ρ
θ
∈ R
6
exp
h
[θ]
×
ρ
0 0
i
M
1
M
2
R x+t
S
1
1
z(t)
T
1
S
1
= iR
T
z
S
1
z
v
^
= i! 2 iR
˙
z = z · i! /2 iR
1
v
^
= i! 2 iR
˙
z = i! 2 iR
!t
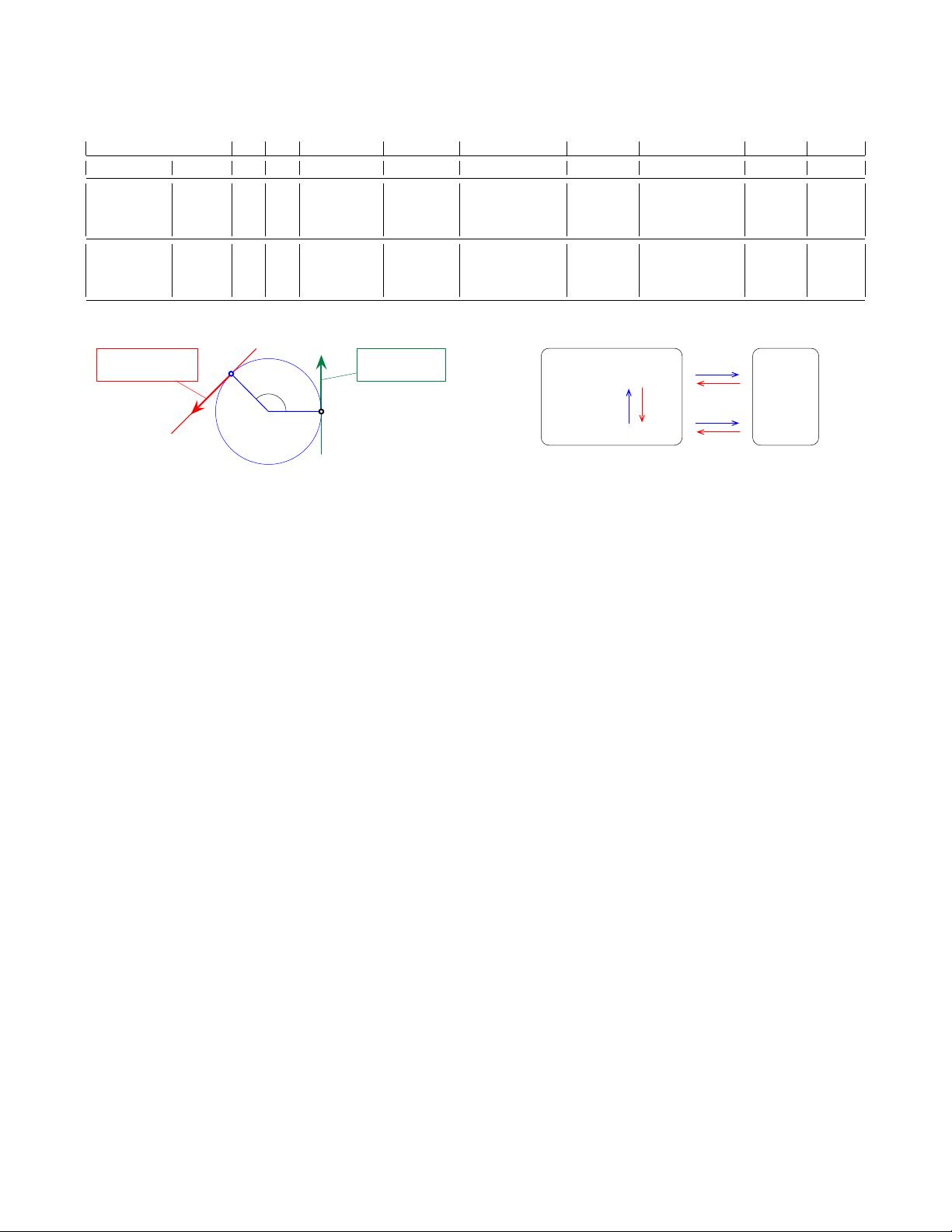
Figure 5. Let a point z ∈ S
1
move at constant rotation rate ω, z(t) =
cos ωt + i sin ωt. Its velocities when passing through 1 and z are in the
respective tangent spaces, T
1
S
1
and T
z
S
1
. In the case of T
z
S
1
, the velocity
is
˙
z = z iω = −ω sin ωt + iω cos ωt when expressed in the global
coordinates, and
z
v
∧
= iω when expressed locally. Their relation is given
by
z
v
∧
= z
−1
˙
z = z
∗
˙
z. In the case of T
1
S
1
, this relation is the identity
1
v
∧
=
˙
z = iω. Clearly, the structure of all tangent spaces is iR, which is
the Lie algebra. This is also the structure of
˙
z at the identity, and this is why
the Lie algebra is defined as the tangent space at the identity.
1) The Lie algebra m: The tangent space at the identity,
T
E
M, is called the Lie algebra of M, and noted m,
Lie algebra : m , T
E
M . (8)
Every Lie group has an associated Lie algebra. We relate the
Lie group with its Lie algebra through the following facts [5]
(see Figs. 1 and 6):
• The Lie algebra m is a vector space.
1
As such, its
elements can be identified with vectors in R
m
, whose
dimension m is the number of degrees of freedom of
M.
• The exponential map, exp : m → M, exactly converts
elements of the Lie algebra into elements of the group.
The log map is the inverse operation.
• Vectors of the tangent space at X can be transformed
to the tangent space at the identity E through a linear
transform. This transform is called the adjoint.
Lie algebras can be defined locally to a tangent point X,
establishing local coordinates for T
X
M (Fig. 5). We shall
denote elements of the Lie algebras with a ‘hat’ decorator,
such as v
∧
for velocities or τ
∧
= (vt)
∧
= v
∧
t for general
elements. A left superscript may also be added to specify the
precise tangent space, e.g.,
X
v
∧
∈ T
X
M and
E
v
∧
∈ T
E
M.
The structure of the Lie algebra can be found (see Exam-
ples 3 and 5) by time-differentiating the group constraint (3).
1
In a Lie algebra, the vector space is endowed with a non-associative
product called the Lie bracket. In this work, we will not make use of it.
X 2 M
log
exp
Log
Exp
(·)
_
(·)
^
Manifold
⌧
^
2 m
Lie algebra
⌧ 2 R
m
Vector
Tangent
T
E
M
Figure 6. Mappings between the manifold M and the representations of its
tangent space at the origin T
E
M (Lie algebra m and Cartesian R
m
). Maps
hat (·)
∧
and vee (·)
∨
are the linear invertible maps or isomorphisms (10–11),
exp(·) and log(·) map the Lie algebra to/from the manifold, and Exp(·) and
Log(·) are shortcuts to map directly the vector space R
m
to/from M.
For multiplicative groups this yields the new constraint
X
−1
˙
X +
˙
X
−1
X = 0, which applies to the elements tangent at
X (the term
˙
X
−1
is the derivative of the inverse). The elements
of the Lie algebra are therefore of the form,
2
v
∧
= X
−1
˙
X = −
˙
X
−1
X . (9)
2) The Cartesian vector space R
m
: The elements τ
∧
of
the Lie algebra have non-trivial structures (skew-symmetric
matrices, imaginary numbers, pure quaternions, see Table I)
but the key aspect for us is that they can be expressed as linear
combinations of some base elements E
i
, where E
i
are called
the generators of m (they are the derivatives of X around the
origin in the i-th direction). It is then handy to manipulate
just the coordinates as vectors in R
m
, which we shall note
simply τ . We may pass from m to R
m
and vice versa through
two mutually inverse linear maps or isomorphisms, commonly
called hat and vee (see Fig. 6),
Hat : R
m
→ m ; τ 7→ τ
∧
=
m
X
i=1
τ
i
E
i
(10)
Vee : m → R
m
; τ
∧
7→ (τ
∧
)
∨
= τ =
m
X
i=1
τ
i
e
i
, (11)
with e
i
the vectors of the base of R
m
(we have e
∧
i
= E
i
).
This means that m is isomorphic to the vector space R
m
—
one writes m
∼
=
R
m
, or τ
∧
∼
=
τ . Vectors τ ∈ R
m
are handier
for our purposes than their isomorphics τ
∧
∈ m, since they
can be stacked in larger state vectors, and more importantly,
2
For additive Lie groups the constraint X −X = 0 differentiates to
˙
X =
˙
X ,
that is, no constraint affects the tangent space. This means that the tangent
space is the same as the group space. See App. E for more details.
下载后可阅读完整内容,剩余16页未读,立即下载
相关推荐




stanley.j
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开








最新资源
- GSM控制下的智能家居监控系统开发
- 电子商务网站毕业设计参考项目
- Android声音调节新特性:旋转进度控件
- 深入解析JavaScript在ConFusionServer中的应用
- 提升软件试用效率的五个实用技巧
- 华南理工大学信号考研真题分析
- 探索Yx模板:高效Lua脚本转换技术
- Build-A-Book: 一款基于Electron和React的写作工具
- 实用的VC++实现Meanshift图像分割技术
- 全界面手势返回上一级实现教程 - iOS开发示例
- SWT/JFace英文API文档解压缩指南
- CCNP SWITCH实验课件笔记详解
- ABAQUS6.5 CAE软件用户手册解析
- FPGA开发板上W5300芯片的稳定代码实现
- 深入理解GroupkeyCache的入门教程
- ResEdit 1.4.13.0 中文版资源编辑软件深度优化






















