RH850/C1M-A RDC3A 整数转换器应用指南
需积分: 5 195 浏览量
更新于2024-06-17
2
收藏 2.39MB PDF 举报
"瑞萨RDC旋变应用笔记主要探讨了如何使用RH850/C1M-A微控制器中的R/D(旋变/数字)转换器(RDC3A),该应用笔记适用于电机控制等应用,详细介绍了旋变传感器的工作原理、RDC3A的基本操作以及如何在实际应用中配置和使用RDC3A。"
本文档首先介绍了RDC3A的主要特性,它作为RH850/C1M-A微控制器的一个组件,用于将旋转变压器(resolver)的模拟信号转换为数字信号,从而便于数字系统处理。旋变是一种用于测量角度位置的传感器,常用于高精度的电机控制系统。
1.1 特性使用:
文档中提到了RDC3A的某些关键功能,可能包括高速转换能力、宽动态范围以及对环境干扰的抵抗能力,这些特性使得RDC3A成为电机控制中的理想选择。
2. R/D转换器基础:
2.1 旋变与旋变数字转换器:
这部分详细解释了旋变的工作原理,作为一种角位移传感器,它通过两个或三个线圈检测转子相对于定子的位置。接着,RDC3A的作用被阐述,它将旋变产生的正弦和余弦信号转换成数字值,以供微控制器处理。
2.1.1 旋变的使用:旋变能够提供连续的、非接触的角度信息,特别适合在高振动、恶劣环境条件下工作。
2.1.2 旋变的工作机制:通过电磁感应来检测角度变化。
2.1.3 连接旋变与R/D转换器:描述了两者之间的硬件连接方法,包括信号线的布局和电源要求。
2.2 R/D转换器的工作机制:
2.2.1 R/D转换器的概念:解释了R/D转换的基本概念,即从模拟信号到数字信号的转换过程。
2.2.2 R/D转换器的实际操作:详细说明了转换过程,可能包括采样、量化和校准步骤。
2.2.3 设置R/D转换器带宽:讨论了根据应用需求调整转换器带宽的重要性,以优化性能和减少噪声影响。
2.3 附录:
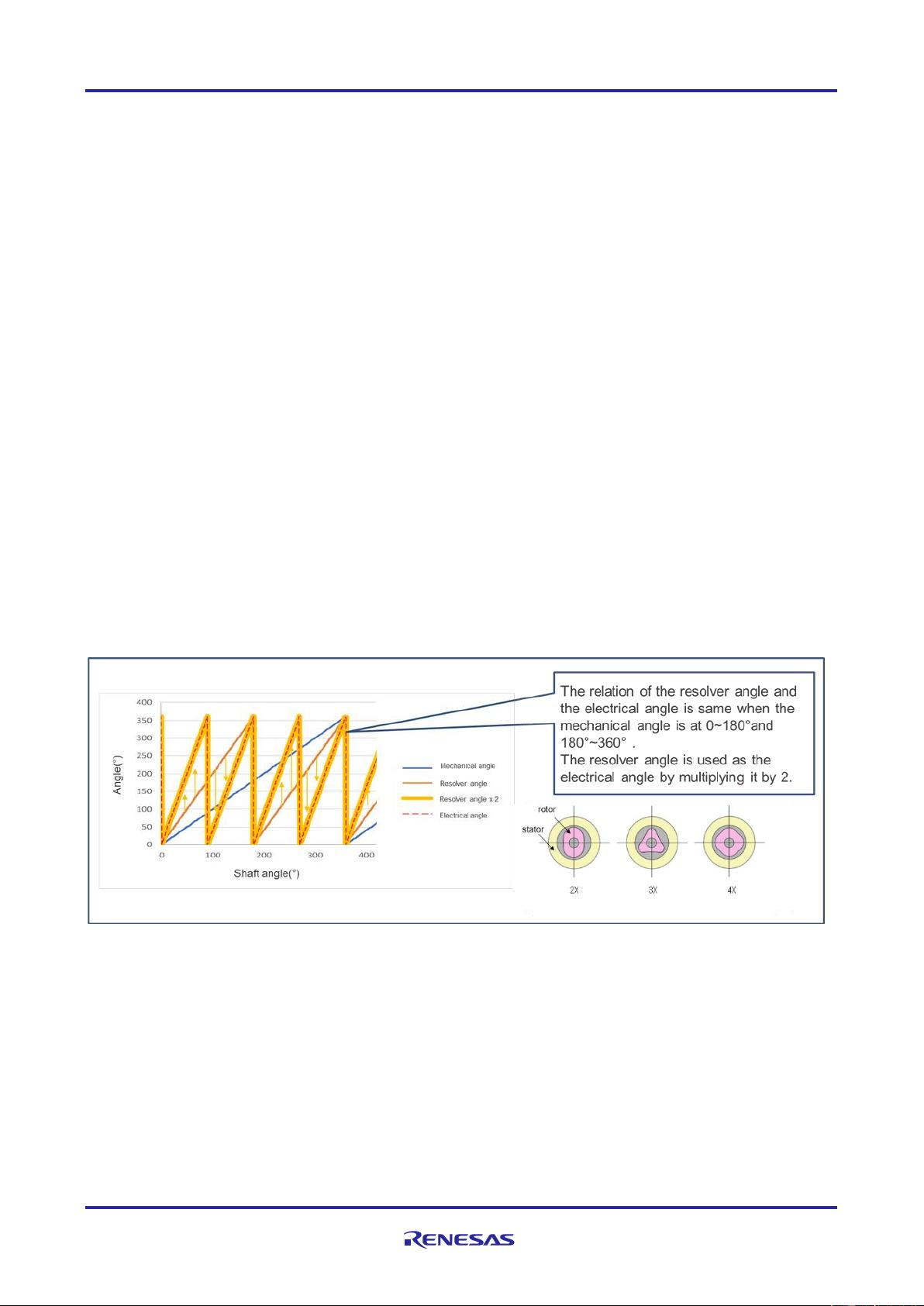
2.3.1 角度处理在电机控制中的注意事项:阐述了在处理电机控制中的角度信息时的一些特殊考虑,如角度的计算和表示方式。
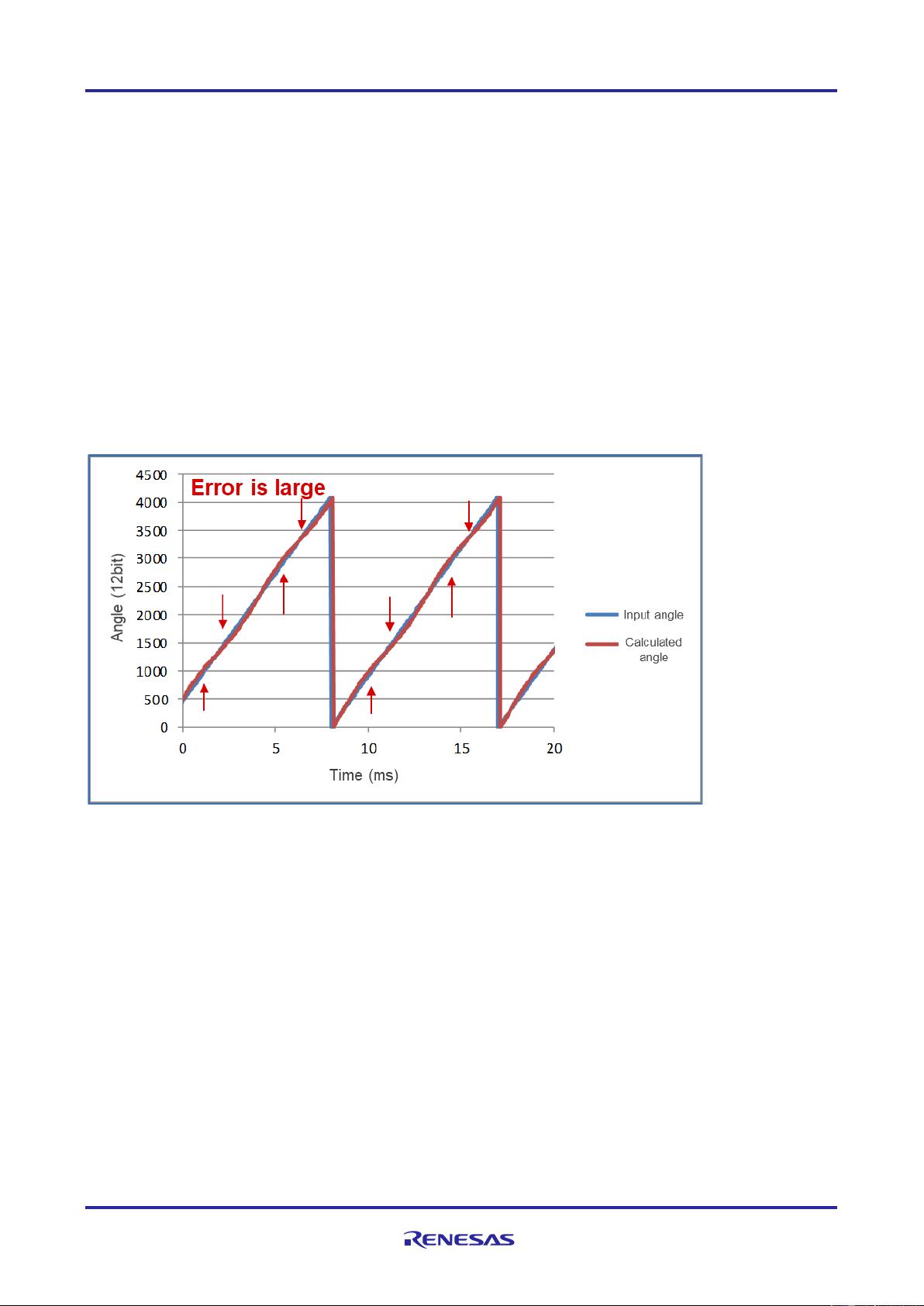
2.3.2 错误发生及其因素:分析了可能导致转换错误的条件和环境因素。
3. 如何使用RDC3A:
从3.1 初始化开始,这一部分提供了实际应用中配置和使用RDC3A的步骤,可能涵盖了初始化设置、参数配置、错误处理和调试技术。
这篇应用笔记不仅提供了理论背景,还包含了许多实用的工程指导,是开发使用RH850/C1M-A和RDC3A进行旋变传感器数据处理的工程师的重要参考资料。通过深入理解这些内容,工程师可以有效地集成和优化RDC3A在各种电机控制应用中的性能。
RH850/C1M-A R/D Converter (RDC3A)
R01AN4051EJ0211 Rev.2.11 Page
8
of 44
July.6.22
ε is the control deviation in this control loop. The negative feedback control provides feedback so that the
control deviation becomes 0. When θ = Φ, the analog angle information from a resolver has been converted
to the digital angle Φ.
Sets the response speed with the PI compensator in a loop.
2.2.3 Setting the R/D Converter Bandwidth
The bandwidth of the PI compensator needs to be set when an R/D converter is used. The bandwidth is
expressed by the frequency. When the frequency is set high, the response becomes quick but has a large
influence by noise and other factors. On the other hand, when the frequency is set low, the response
becomes slow and immune to noise and the R/D converter output becomes stable. For an R/D converter
mounted on the Renesas MCU, the default is 800Hz and can be changed.
Some R/D converters have a function to set the bandwidth automatically. When this function is used, the
bandwidth is set low when the resolver is stable and it is set high automatically when the quick response is
required such as at acceleration. The R/D converters mounted on the Renesas MCU have an auto-adjusted
function.
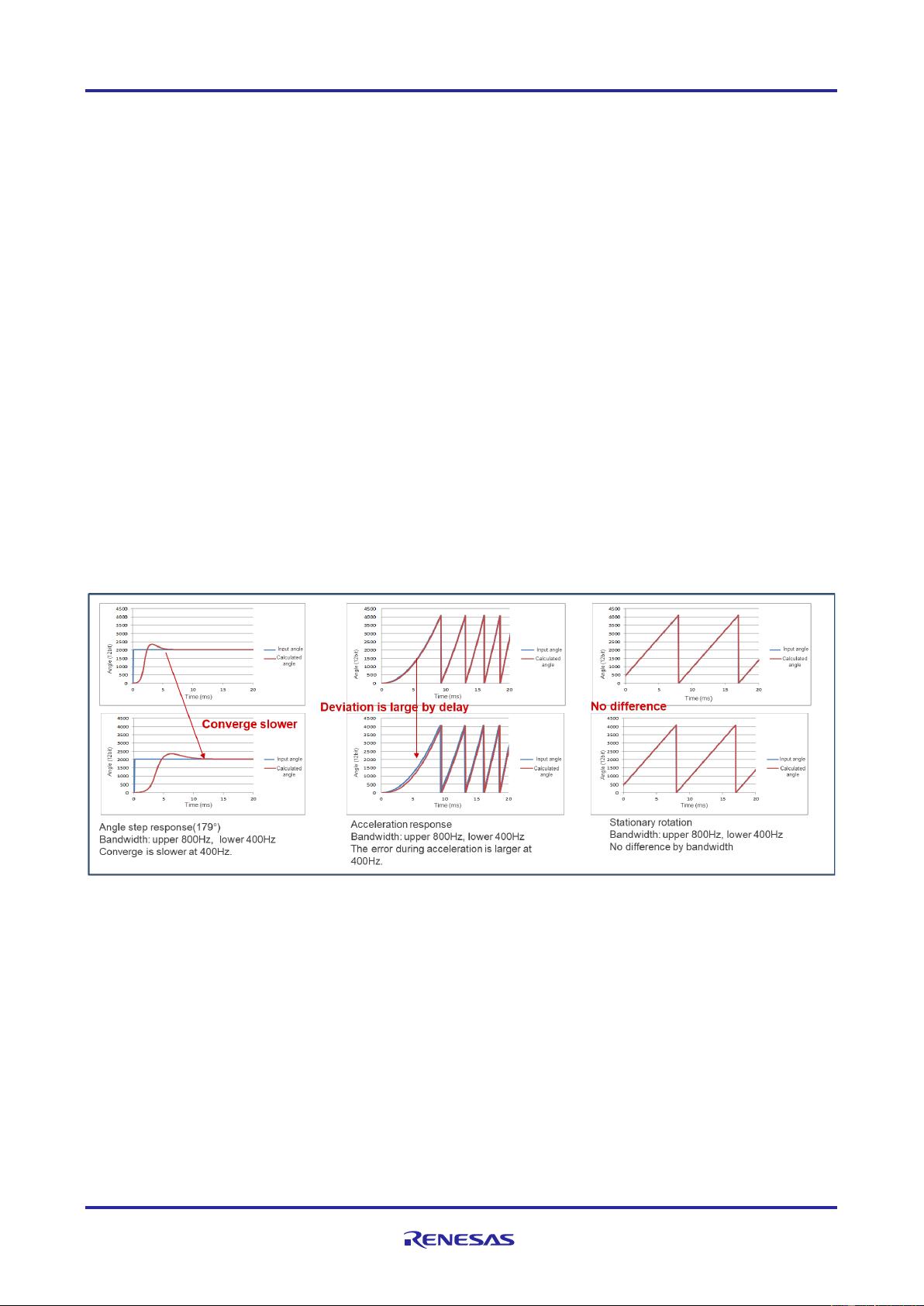
The bandwidth setting of an R/D converter has influence on response speed for acceleration and angle step
but has no influence on the maximum speed of when a resolver is rotating stationary. For example, when the
bandwidth is set low (around 200Hz), if a resolver is slowly accelerated, it can be tracked even the final
speed is high (for example 1000Hz=60000rpm). Also, when a resolver is rotating stationary at high speed,
inside an R/D converter remains stationary (ε is small) and the bandwidth is set low in auto-adjusted.
Figure 2.7 Output Change by the Bandwidth Change of PI Compensator shows the difference in output
by the bandwidth of PI compensator setting.
Figure 2.7 Output Change by the Bandwidth Change of PI Compensator
剩余45页未读,继续阅读
2024-03-16 上传
2023-01-12 上传
2011-08-03 上传
2021-01-12 上传
2021-10-01 上传
2009-02-17 上传
2020-06-29 上传
2020-12-01 上传
2024-01-17 上传

John_Tang_
- 粉丝: 5
- 资源: 11
 我的内容管理
展开
我的内容管理
展开







最新资源
- sweet_smoke_lp
- SPWM.rar_单片机开发_Windows_Unix_
- GMSMapView-Additions:自定义GMSMapView“我的位置”按钮
- Django_Network:Django社交网络
- ImageLab-Initial:ImageLab是一个独立工具,可让用户使用其GUI玩OpenCV
- Teste-oo1:用StackBlitz创建:high_voltage:
- Web应用程序和服务的集中式和分布式日志记录,扩展了System.Diagnostics和Essential.Diagnostics,提供了结构化的跟踪和日志记录,无需更改应用程序代码的1行-JavaScript开发
- torch_sparse-0.6.9-cp36-cp36m-macosx_10_9_x86_64whl.zip
- yukimryh.zip_matlab例程_matlab_
- TeTsuYa IRC Bot-开源
- qa_guru_4_10_owner_xt4k:草稿
- Assembla Mentions-crx插件
- 点击:简单的React useState钩子示例
- 参考资料-中国的书法艺术和技巧.蓝铁.zip
- 一个无主题的Web组件,用于根据表单字段值过滤可见的子元素。-JavaScript开发
- arduino-volume2:Arduino tone()-仅使用扬声器即可实现多种波形和8位音量控制!
