使用VECTOR工具创建CDD与IoHwAb的步骤指南
需积分: 46 16 浏览量
更新于2024-08-27
收藏 549KB PDF 举报
本文是一份名为"AN-ISC-8-1228_How_to_create_Cdd_IoHwAb.pdf"的应用笔记,由Christian Leder撰写,发布于2018年9月14日,主要针对MICROSAR 4版本,提供了关于在VECTOR工具环境下创建复杂设备驱动(CDD)和输入/输出硬件抽象层(IoHwAb)的详细指南。在AUTOSAR架构中,IoHwAb位于ECU抽象层的一部分,负责处理硬件与软件之间的交互。
文章首先概述了CDD和IoHwAb的基本概念。CDD是专为实现复杂硬件功能而设计的软件组件,它负责处理底层硬件操作,并确保与上层软件模块的无缝集成。IoHwAb则提供了一种标准化的接口,使得软件开发者无需详细了解底层硬件就能进行编程。
第二部分深入探讨了SWC(System-Wide Configuration)的相关基础知识。这部分包括:
1. **Sender/Receiver Ports**:定义了数据传输的方向和方式,如发送者用于发出数据,接收者用于接收数据,是CDD和IoHwAb间通信的基础。
2. **Client/Server Ports**:服务端和客户端的概念,用于在不同组件间建立连接,执行特定的服务请求和响应。
3. **Runnable Entities**:可执行实体,代表系统中的独立任务或操作,可以在适当的时候被调度执行。
4. **Exclusive Areas/Critical Sections**:用于保护共享资源,确保并发访问的正确性和同步性。
5. **Interrupt Propagation**:中断传播机制,涉及硬件中断的管理,确保在硬件事件发生时,能正确地传递到软件处理。
第三部分通过实际例子展示了如何使用DaVinci Developer和DaVinci Configurator Pro这两个VECTOR工具来配置CDD和IoHwAb。这些工具在创建、编译和调试过程中起到关键作用,帮助开发者快速有效地搭建硬件驱动程序。
最后,文档列出了缩写词表和联系方式,以及版权声明和Vector Informatik GmbH公司的联系信息,以便读者获取更多支持或澄清疑问。
总结来说,本文是一份实用的手册,旨在指导用户在MICROSAR 4环境中利用VECTOR工具创建高效且可靠的CDD和IoHwAb,以优化汽车电子控制单元(ECU)的硬件抽象,提高软件开发效率和系统稳定性。
How to create Cdd / IoHwAb with MICROSAR 4
Copyright © 2018 - Vector Informatik GmbH 3
Contact Information: www.vector.com or +49-711-80 670-0
2 Basics on SWCs
The interfaces between SWCs are defined formally. The AUTOSAR Interface is used hereby. It is
application-specific and generated by Rte. The AUTOSAR Interface of a SWC is defined via ports and
enables the data exchange between SWCs or between a SWC and a Cdd / IoHwAb.
Generally, the following ports can be used for communication between SWCs:
> Sender / Receiver Ports
> Client / Server Port
> Parameter Ports
> Non-volatile Data Ports
> Trigger Ports
> Mode Switch Ports
In the following only sender/receiver and client/server ports are described in more detail, because
they are most relevant for the implementation of Cdds and IoHwAbs.
2.1 Sender/Receiver Ports
Sender/Receiver Ports are used to specify the output or input data of a SWC. Data is defined by so-
called data elements of a Sender/Receiver Interface. In a simplified way, the data element principle
can be seen as follows:
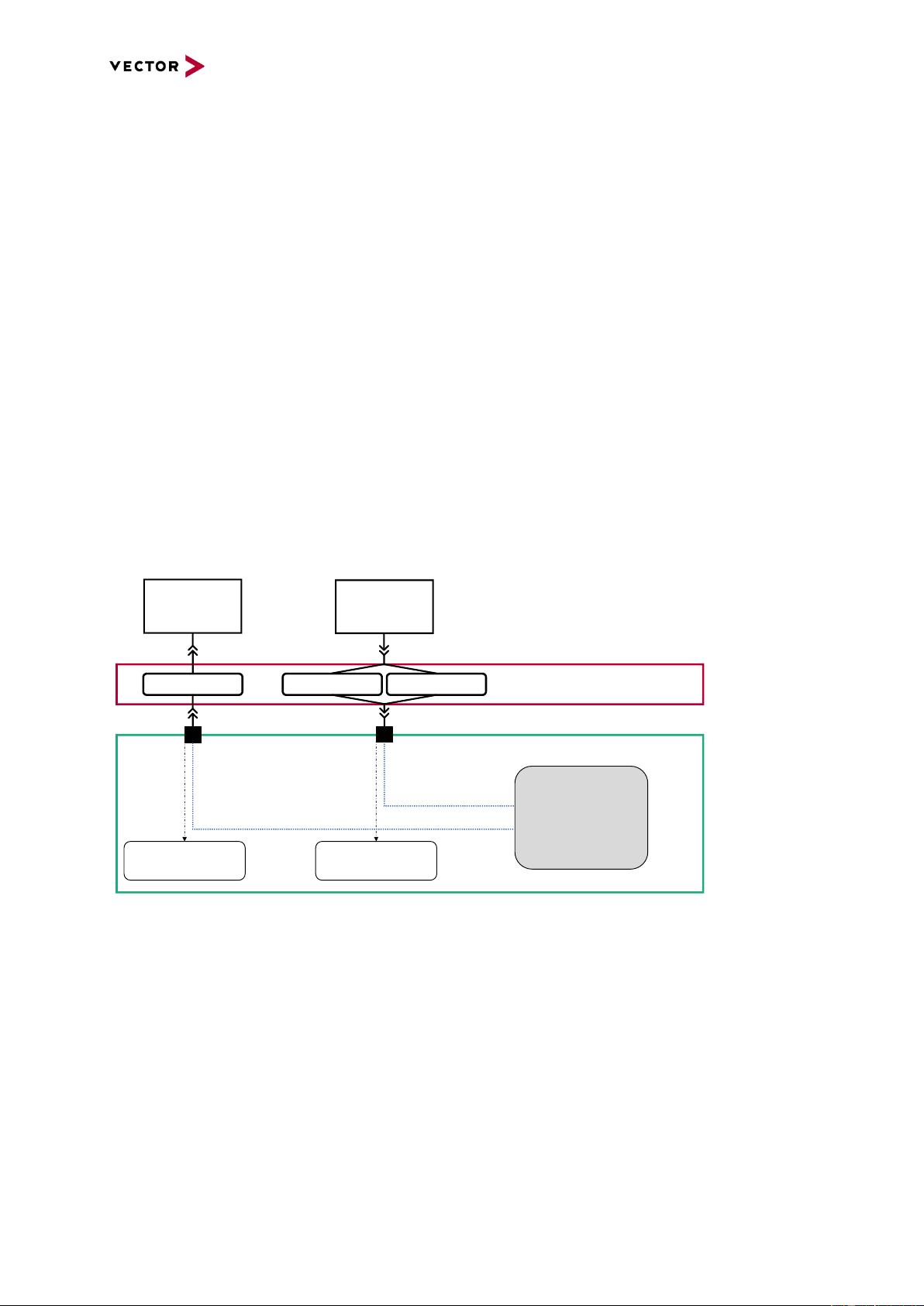
Figure 2-1 Sender-Receiver Concept
Data Elements are defined within the Rte and can be accessed via Rte APIs. Only the part of the Cdd
is shown in a more detailed point of view. The application software component must own the
counterpart of the port – a Receiver Port Prototype 1 (of S/R Port Interface 1) and a Sender Port
Prototype 2 (of S/R Port Interface 2).
Application
Software
Component 1
Application
Software
Component 2
RTE
CDD
Data Element 0 Data Element 1 Data Element 2
Sender Port Prototype 1
of S/R Port Interface 1
Receiver Port Prototype 2
of S/R Port Interface 2
S/R Port Interface 1
with 1 Data Element
S/R Port Interface 2
with 2 Data Elements
Access to all data
elements
via Rte API
Runnable
Rte_Read_<port>_<dataElement>
Rte_Write_<port>_<dataElement>
剩余11页未读,继续阅读
2024-08-21 上传
2023-04-13 上传
2022-09-19 上传
2021-10-04 上传
2021-08-09 上传
2020-03-18 上传
2021-02-04 上传
2021-08-21 上传

翰海晴空
- 粉丝: 3
- 资源: 12
 我的内容管理
展开
我的内容管理
展开







最新资源
- PureMVC AS3在Flash中的实践与演示:HelloFlash案例分析
- 掌握Makefile多目标编译与清理操作
- STM32-407芯片定时器控制与系统时钟管理
- 用Appwrite和React开发待办事项应用教程
- 利用深度强化学习开发股票交易代理策略
- 7小时快速入门HTML/CSS及JavaScript基础教程
- CentOS 7上通过Yum安装Percona Server 8.0.21教程
- C语言编程:锻炼计划设计与实现
- Python框架基准线创建与性能测试工具
- 6小时掌握JavaScript基础:深入解析与实例教程
- 专业技能工厂,培养数据科学家的摇篮
- 如何使用pg-dump创建PostgreSQL数据库备份
- 基于信任的移动人群感知招聘机制研究
- 掌握Hadoop:Linux下分布式数据平台的应用教程
- Vue购物中心开发与部署全流程指南
- 在Ubuntu环境下使用NDK-14编译libpng-1.6.40-android静态及动态库
