无人机视觉目标跟踪:现状、挑战与深度学习前景
版权申诉
52 浏览量
更新于2024-06-29
2
收藏 516KB DOCX 举报
本文档深入探讨了"面向无人机的视觉目标跟踪算法:综述与展望"这一主题,着重关注了在无人机广泛应用背景下,视觉目标跟踪技术的重要性及其在复杂环境中的挑战。无人机因其灵活性和便捷性,被广泛应用于各种任务,其中目标跟踪是关键功能,尤其是在不需要物理接触的场景中。
视觉目标跟踪是基于计算机视觉的技术,它通过在初始视频帧中识别出感兴趣区域,然后通过连续帧的分析来预测目标的运动轨迹。然而,针对无人机环境,跟踪面临四大挑战:
1. 复杂背景和目标辨识:由于无人机视野开阔,目标容易与周围物体混淆,导致目标模型的精确性和排他性降低。此外,高空中目标尺度小、特征不明显,使得特征提取和识别更为困难。
2. 图像质量变化:随着飞行高度增加,图像分辨率下降,这使得目标检测和跟踪的精度受到影响。风力等外部因素可能导致相机不稳定,增加跟踪误差。
3. 计算资源限制:许多无人机受限于单核CPU,对运算复杂度有严格的限制。这就需要开发出既能保证跟踪精度又能有效利用有限资源的算法。
4. 技术发展与空间:尽管视觉目标跟踪算法已有显著进步,但这些挑战的存在仍为该领域的未来发展提供了广阔的空间。
文档还提及了两种主要的视觉目标跟踪方法:生成类跟踪和判别类跟踪。生成类方法假设目标外观不变,但在动态场景中表现欠佳;判别类方法,特别是基于相关滤波和深度学习的方法,虽然提高了样本处理能力,但仍需应对复杂变化的跟踪条件。
本文档通过对无人机视觉目标跟踪算法的现状和问题进行深入剖析,强调了该领域的重要性和未来的研究方向,旨在推动相关技术的进一步发展和优化。
目前,许多技术已经被用来提高深度网络跟踪器的性能(例如,空间感知采样策略、区域生成网络、
数据增强策略、高效的检测和尺度估计策略等),根据不同的硬件实现,各种各样的算法被分类为实时跟
踪器。Nam 等
[27]
提出的 MDNet 算法将深度学习引入目标跟踪,提取目标的运动特征,能较好地区分目标
和背景区域,且网络简单,能达到实时跟踪的效果。Bertinetto 等
[29]
提出了 SiamFC 算法,真正打破了相
关滤波在跟踪领域的垄断地位,利用全卷积孪生网络对跟踪数据进行端到端的训练,结构简单。ADNet
算法
[28]
在 MDNet 基础上,引入深度强化学习,该算法具有较高的跟踪精度和尺度变化鲁棒性,且网络轻
量,能够达到实时跟踪。CFNet 算法
[30]
和 DSiam 算法
[32]
在 SiamFC 基础上,分别结合相关滤波和动态思
想,在保证跟踪准确度的同时,提高了网络实时跟踪的能力,且对目标外观变化、背景变化有较好的鲁棒
性。Li 等
[75]
提出一种 Mate-TD3 算法,结合元学习和多任务强化学习策略,提高算法的收敛速度,实现无
人机的有效控制,使无人机能够快速跟踪不确定运动的目标。精度和速度的提升,使得基于深度网络的跟
踪器能够满足工业领域的应用,例如智能汽车的自主跟踪、无人机的智能跟随等。
基于 Siamese 的神经网络算法在跟踪性能和效率之间达到了很好的平衡,该网络设计的初衷就是为
了使算法变得更快更准,实现算法在工业领域的应用,是目前目标跟踪领域较有前景的网络结构
[33-34, 76-
80]
。大多基于 Siamese 网络的跟踪器均采用离线训练的方式,在跟踪过程中不对目标模型进行更新,从
而提高目标跟踪速度。基于 Siamese 网络的视觉跟踪算法将在第 3 节中进行详细的介绍。
2 基于相关滤波的无人机目标跟踪
由于无人机本身特性的制约,相关滤波跟踪算法以其简单快速的优点逐渐应用于无人机领域,虽然
基于相关滤波的各种跟踪算法框架类似,但每种算法均有各自的贡献和特点。本节详细介绍了 8 种具有创
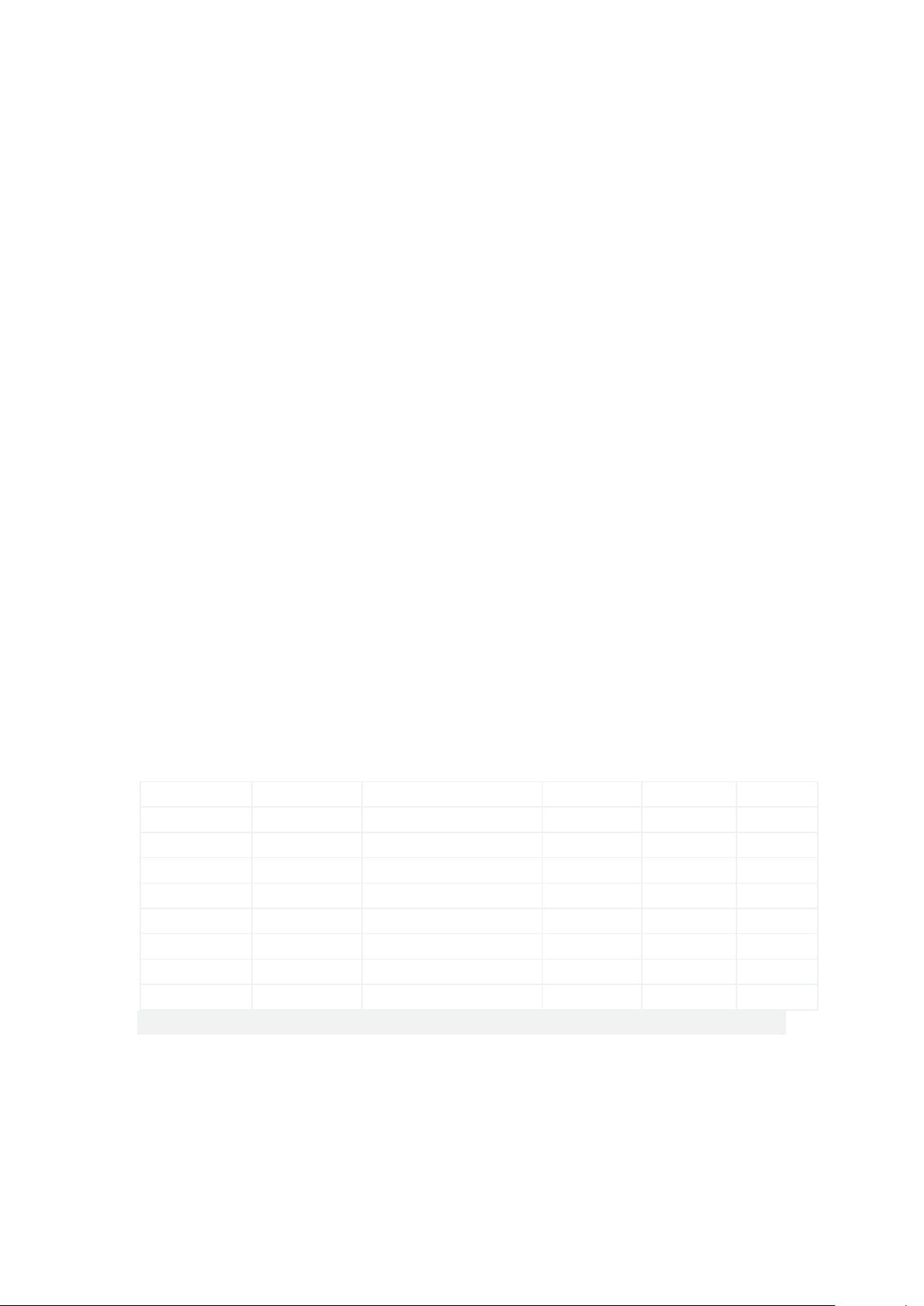
造性贡献的相关滤波跟踪算法,并对比了各种算法的特性及其在无人机数据集 UAV123 上的跟踪效果,
如表 2 所示。
表 2 相关滤波目标跟踪算法及其在 UAV123 数据集的跟踪效果对比 Tab.2 Comparison of CF tracking
algorithms and their performance conducted on UAV123
跟踪算法
出版物
特征
尺度估计
帧率/(帧/s)
距离精度
DSST
[19]
BMVC 2014
HOG
尺度滤波器
85.43
0.586
SAMF
[17]
ECCV 2014
HOG+CN
尺度池
10.05
0.597
KCF
[20]
TPAMI 2015
HOG
单一尺度
611.65
0.523
SRDCF
[21]
ICCV 2015
HOG
尺度池
11.08
0.676
BACF
[22]
ICCV 2017
HOG
尺度池
43.45
0.660
STRCF
[23]
CVPR 2018
HOG+CN+Grayscale
尺度池
22.58
0.681
ARCF
[24]
ICCV 2019
HOG+CN+Grayscale
尺度池
40.36
0.667
AutoTrack
[26]
CVPR2020
HOG+CN+Grayscale
尺度池
48.21
0.689
表选项
由于结合深度特征的相关滤波算法跟踪速度会变慢,故表 2 中主要介绍的是使用传统特征,如
HOG(histogram of oriented gradient)、CN(color names)或灰度(Grayscale)的相关滤波算法,由表 2 可
看出,SRDCF、BACF、STRCF、ARCF 和 AutoTrack 相比于以往算法,在精度上有了显著提升,但跟
踪速度相对下降,其中 AutoTrack 算法在速度和精度上达到了很好的平衡。SAMF、STRCF、ARCF 和
剩余20页未读,继续阅读
2022-11-29 上传
2021-09-20 上传
2022-10-29 上传
2023-04-22 上传
2021-09-14 上传
2023-03-10 上传

罗伯特之技术屋
- 粉丝: 4558
 我的内容管理
展开
我的内容管理
展开







最新资源
- 易酷免费影视系统:开源网站代码与简易后台管理
- Coursera美国人口普查数据集及使用指南解析
- 德加拉6800卡监控:性能评测与使用指南
- 深度解析OFDM关键技术及其在通信中的应用
- 适用于Windows7 64位和CAD2008的truetable工具
- WM9714声卡与DW9000网卡数据手册解析
- Sqoop 1.99.3版本Hadoop 2.0.0环境配置指南
- 《Super Spicy Gun Game》游戏开发资料库:Unity 2019.4.18f1
- 精易会员浏览器:小尺寸多功能抓包工具
- MySQL安装与故障排除及代码编写全攻略
- C#与SQL2000实现的银行储蓄管理系统开发教程
- 解决Windows下Pthread.dll缺失问题的方法
- I386文件深度解析与oki5530驱动应用
- PCB涂覆OSP工艺应用技术资源下载
- 三菱PLC自动调试台程序实例解析
- 解决OpenCV 3.1编译难题:配置必要的库文件
