"基于MATLAB的液位与流量串级控制系统设计与仿真毕业论文"
181 浏览量
更新于2023-12-06
1
收藏 1.1MB DOC 举报
本论文是关于基于MATLAB的液位与流量串级控制系统设计与仿真的毕业设计论文。论文提交时间为2011年5月20日,论文答辩时间为2011年5月28日。该论文来自北方民族大学电气信息工程学院,专业为电气工程及其自动化。论文的原创性声明和使用授权说明已经在论文中做出了明确的说明,并经过了作者和指导教师的签名确认。
该论文主要围绕液位与流量串级控制系统的设计与仿真展开,使用MATLAB进行系统建模和仿真。液位与流量控制是工业过程中非常重要的一部分,涉及到液体在容器中的高度以及流经管道的流速等参数。通过设计串级控制系统,可以更好地实现液位和流量的精确控制,提高工业生产的效率和稳定性。
在论文中,作者详细介绍了液位与流量串级控制系统的原理和相关理论知识,包括传感器测量、控制阀的调节、PID控制器的设计等方面。然后,作者利用MATLAB软件对系统进行了建模和仿真,验证了所设计的控制系统在不同工况下的性能表现。
在研究过程中,作者充分发挥了创造性思维,针对系统模型和控制算法进行了改进和优化,以提高系统的稳定性和控制精度。通过对比不同方案的仿真结果,作者对串级控制系统的性能进行了分析和评价,指出了存在的问题并提出了改进方向。
最后,作者对论文的研究成果进行了总结和展望,指出了液位与流量串级控制系统在工业自动化领域的应用前景,并提出了未来进一步深入研究的方向和重点。
该论文的研究成果对液位与流量控制系统的设计与优化具有一定的理论和实际指导意义,为工业自动化领域的研究和应用提供了有益的参考。同时,论文的严谨性和创新性也得到了指导教师和评审专家的肯定和认可。
总之,该毕业设计论文基于MATLAB的液位与流量串级控制系统设计与仿真,系统地介绍了液位与流量控制系统的原理和设计方法,提出了改进方案并进行了仿真验证,具有一定的学术和实际价值。希望该论文的研究成果能够为相关领域的研究和工程应用提供一定的借鉴和启发。
北方民族大学学士学位论文 基于 MATLAB 的液位与流量串级控制设计与仿真
4
第 2 章 串级控制系统
2.1 串级控制系统的概述
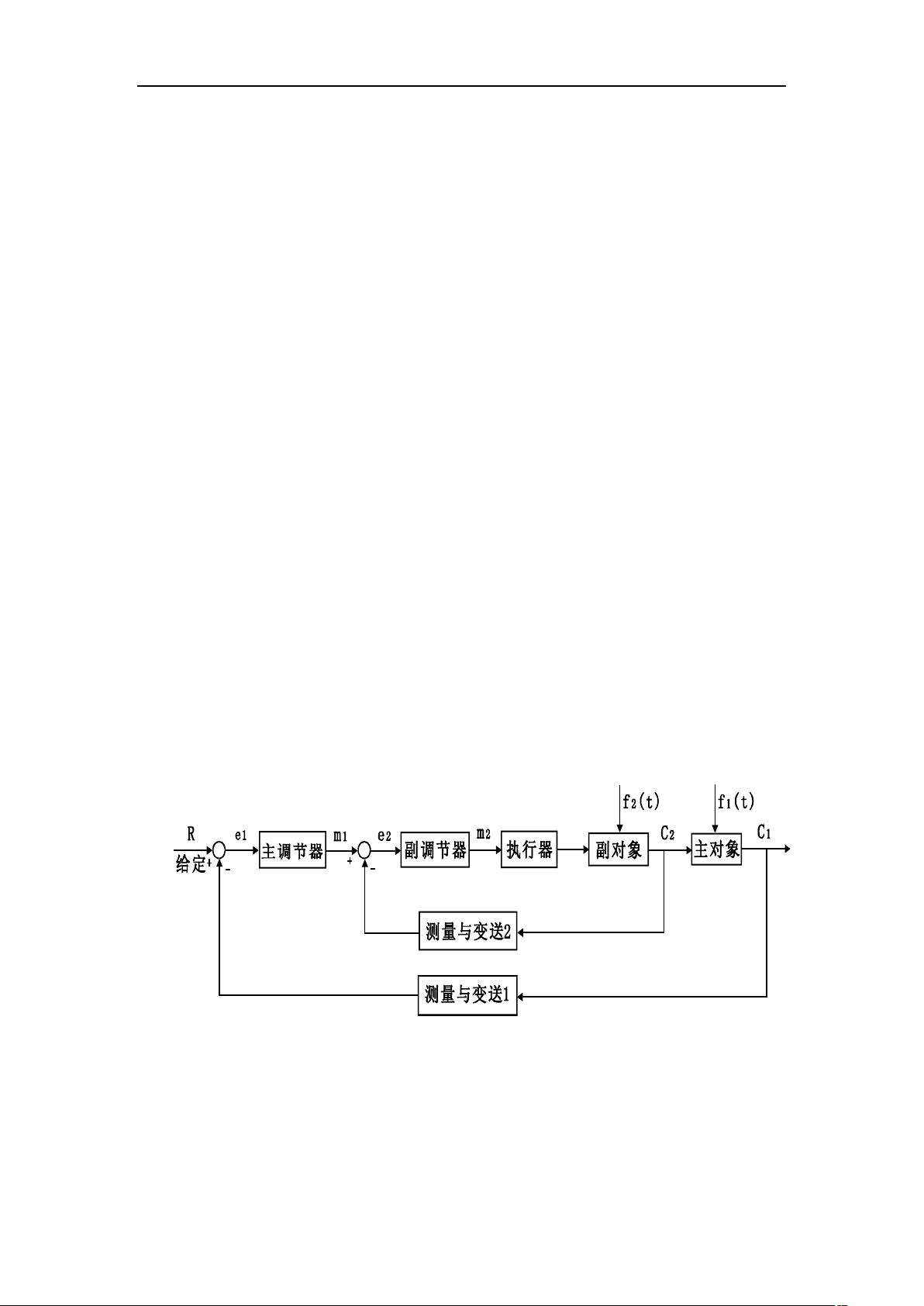
2.1.1 基本概念及组成结构
串级控制系统采用两套检测变送器和两个调节器,前一个调节器的输出作为
后一个调节器的设定,后一个调节器的输出送往调节阀。
前一个调节器称为主调节器,它所检测和控制的变量称主变量(主被控参
数),即工艺控制指标;后一个调节器称为副调节器,它所检测和控制的变量称
副变量(副被控参数),是为了稳定主变量而引入的辅助变量。
整个系统包括两个控制回路,主回路和副回路。副回路由副变量检测变送、
副调节器、调节阀和副过程构成;主回路由主变量检测变送、主调节器、副调节
器、调节阀、副过程和主过程构成。
一次扰动:作用在主被控过程上的,而不包括在副回路范围内的扰动。二次
扰动:作用在副被控过程上的,即包括在副回路范围内的扰动
[1]
。
如图 2.1 所示:
图 2.1 串级控制流程图
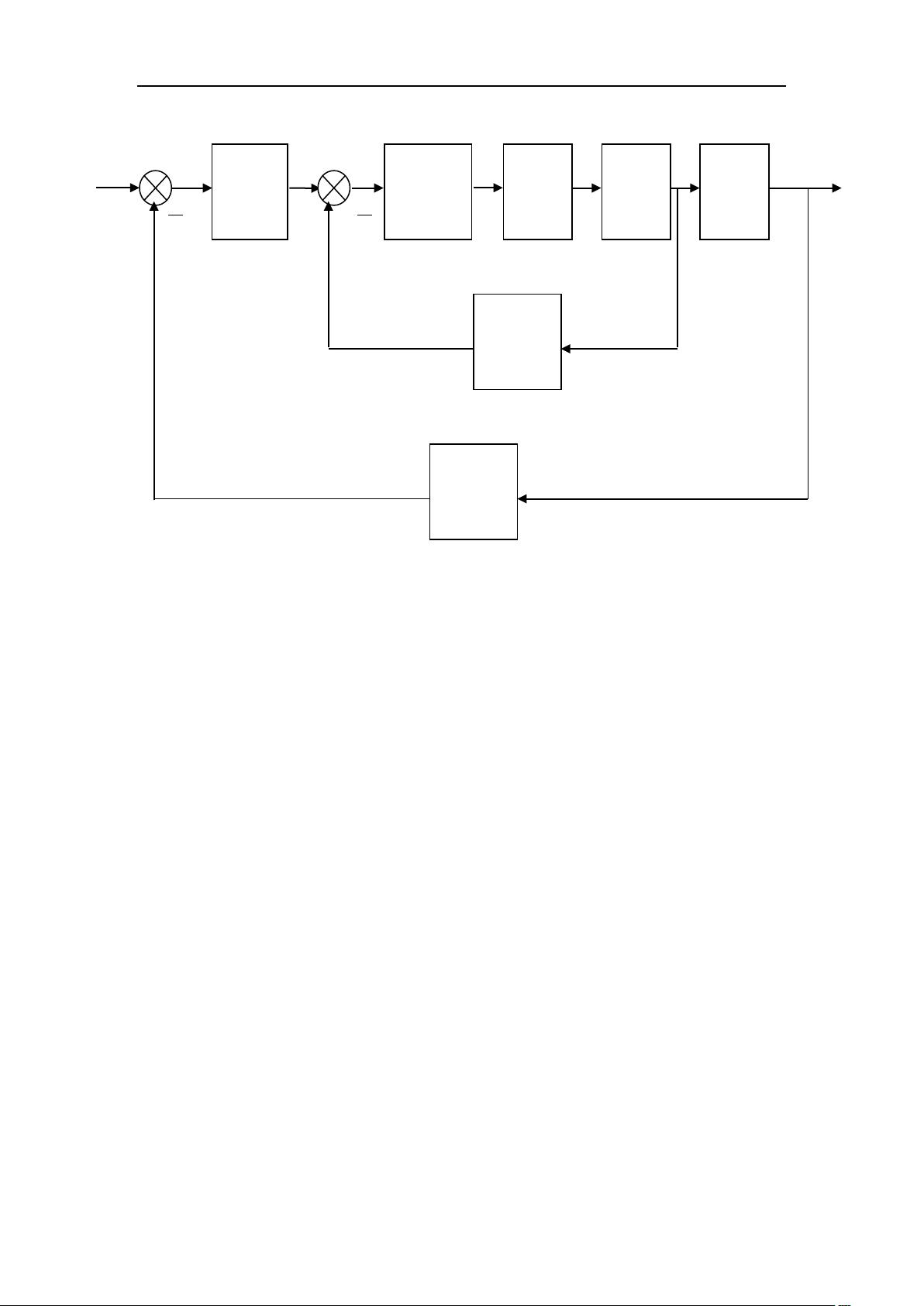
通过上述本设计所对应的串级框图如图 2.2 所示:

剩余59页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-09-18 上传
2023-07-08 上传
2023-07-08 上传
2023-06-30 上传
2021-12-08 上传
2022-11-30 上传

Mmnnnbb123
- 粉丝: 762
- 资源: 8万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 血色素沉着病:混合了性别和基因型的血液样本具有铁血毒性
- 参考资料-基于soc单片机的ph值检测与控制.zip
- Copy Tab-crx插件
- pandas_flavor-0.1.2.tar.gz
- Tcldrop-开源
- zTail-开源
- 通往软件架构师的道路-Python开发
- Laboratorio7_CVDS
- 恶意软件收集:计算机的恶意软件,压力测试等的源代码
- whiteboard-angular-client:白板前端。 Whiteboard Web App的Angular客户端。 :books:
- pandas_flavor-0.1.1.tar.gz
- iTab - Awesome Tab Manager-crx插件
- aria2c-android-app:aria2c-android-app
- projecting
- x70talk-开源
- DPDraggableButton-Swift:拖动或点击按钮以触发手势事件
