3D点云范围扫描中考虑对象边界的特征提取方法
需积分: 9 178 浏览量
更新于2024-08-31
收藏 1.23MB PDF 举报
本文探讨了在三维点云数据中进行对象识别和姿态识别的关键点特征提取方法,特别是在处理3D范围扫描数据时。研究者们提出了一个新颖的兴趣点提取算法,该算法专注于操作由任意3D点云生成的范围图像,特别强调对物体边界进行考虑。这些边界是由从前景到背景的明显转变来界定的对象区域。
算法的核心在于它能有效地捕捉这些对象边界,并以此作为特征提取的基础,这有助于提高识别的准确性和鲁棒性。为了增强特征描述的准确性,研究者们同时设计了一个特征描述子,它能够充分利用这些边界信息,从而增强点云数据中的特征表达能力。
作者Bastian Steder、Radu Bogdan Rusu、Kurt Konolige和Wolfram Burgard在实施他们的方法后,进行了严谨的实验评估。他们关注于关键点的重复性(即在不同场景或角度下,相同位置特征点的一致性)和匹配能力(即不同特征点之间的关联性),这些都是衡量特征提取算法性能的重要指标。此外,他们还通过对点特征为基础的物体检测方法的效果进行测试,来验证这些特征对于实际应用的实用性。
在实际应用中,这种考虑对象边界的点特征提取技术可以广泛应用于无人机导航、自动驾驶、机器人视觉以及虚拟现实等领域,提高系统对复杂环境的理解和适应能力。通过精确地定位和描述关键点,它有助于解决物体识别中的遮挡问题,增强场景理解和交互。
总结来说,本文提出的点特征提取方法在三维范围扫描数据处理中引入了新的视角,通过考虑对象边界,优化了特征选择和描述,为提升3D点云对象识别和姿态估计的性能提供了有力支持。同时,其实验验证和评估确保了方法的可靠性和有效性,为未来的相关研究奠定了坚实基础。
Point Feature Extraction on 3D Range Scans
Taking into Account Object Boundaries
Bastian Steder Radu Bogdan Rusu Kurt Konolige Wolfram Burgard
Abstract— In this paper we address the topic of feature ex-
traction in 3D point cloud data for object recognition and pose
identification. We present a novel interest keypoint extraction
method that operates on range images generated from arbitrary
3D point clouds, which explicitly considers the borders of
the objects identified by transitions from foreground to back-
ground. We furthermore present a feature descriptor that takes
the same information into account. We have implemented our
approach and present rigorous experiments in which we analyze
the individual components with respect to their repeatability
and matching capabilities and evaluate the usefulness for point
feature based object detection methods.
I. INTRODUCTION
In object recognition or mapping applications, the ability
to find similar parts in different sets of sensor readings is
a highly relevant problem. A popular method is to estimate
features that best describe a chunk of data in a compressed
representation and that can be used to efficiently perform
comparisons between different data regions. In 2D or 3D
perception, such features are usually local around a point
in the sense that for a given point in the scene its vicinity
is used to determine the corresponding feature. The entire
task is typically subdivided into two subtasks, namely the
identification of appropriate points, often referred to as
interest points or key points, and the way in which the
information in the vicinity of that point is encoded in a
descriptor or description vector.
Important advantages of interest points are that they
substantially reduce the search space and computation time
required for finding correspondences between two scenes and
that they furthermore focus the computation on areas that are
more likely relevant for the matching process. There has been
surprisingly little research for interest point extraction in raw
3D data in the past, compared to vision, where this is a well
researched area. Most papers about 3D features target only
the descriptor.
In this paper we focus on single range scans, as obtained
with 3D laser range finders or stereo cameras, where the
data is incomplete and dependent on a viewpoint. We chose
range images as the way to represent the data since they
reflect this situation and enable us to borrow ideas from the
vision sector.
We present the normal aligned radial feature (NARF), a
novel interest point extraction method together with a feature
descriptor for points in 3D range data. The interest point
B. Steder and W. Burgard are with the Dept. of Computer Science
of the University of Freiburg, Germany. {steder,burgard}@informatik.uni-
freiburg.de; R. Rusu and K. Konolige are with Willow Garage Inc., USA.
{rusu,konolige}@willowgarage.com
(a)
(b)
(c)
(d)
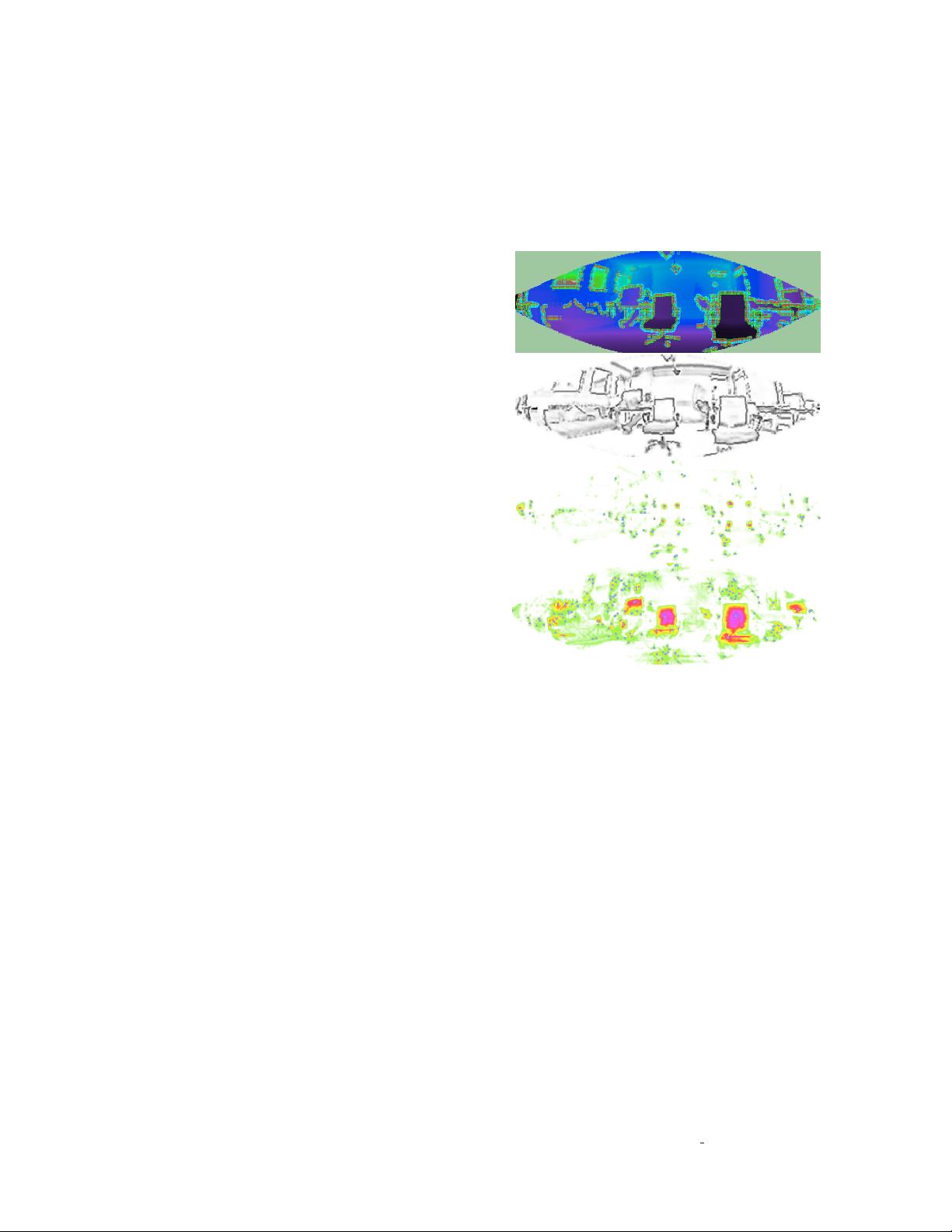
Fig. 1. The interest point extraction procedure. (a) Range image of an
office scene with two chairs in the front with the extracted borders marked.
(b) Surface change scores according to borders and principle curvature. (c)
Interest values with marked interest points for a support size of 20cm. Note
how the corners of the chairs are detected as interest points at this scale. (d)
Interest values with marked interest points for a support size of 1m. Note
how, compared to (c), the whole surface of the chair’s backrests contain one
interest point at this scale.
extraction method has been designed with two specific goals
in mind: i) the selected points are supposed to be in positions
where the surface is stable (to ensure a robust estimation
of the normal) and where there are sufficient changes in
the immediate vicinity; ii) since we focus on partial views,
we want to make use of object borders, meaning the outer
shapes of objects seen from a certain perspective. The outer
forms are often rather unique so that their explicit use in the
interest point extraction and the descriptor calculation can be
expected to make the overall process more robust. For this
purpose, we also present a method to extract those borders.
To the best of our knowledge, no existing method for feature
extraction tackles all of these issues.
Figure 1 shows an outline of our interest point extraction
procedure. The implementation of our method is available
under an open-source license
1
.
1
The complete source code including instructions about
running the experiments presented in this paper can be found at
http://www.ros.org/wiki/Papers/ICRA2011
Steder
下载后可阅读完整内容,剩余7页未读,立即下载
2011-10-13 上传
2019-03-27 上传
2021-09-29 上传
2022-07-13 上传
2011-09-13 上传
2015-11-28 上传
2011-04-09 上传
2022-07-13 上传
2021-05-29 上传

Upupup6
- 粉丝: 1875
- 资源: 35
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
