ABB 机器人RAPID 程序指令详解及应用实例
版权申诉
30 浏览量
更新于2024-03-02
收藏 207KB DOCX 举报
ABB机器人在实际应用中提供了丰富的RAPID程序指令,方便了用户对程序的编制,并为复杂应用的实现提供了可能。以下对RAPID程序指令和功能进行分类并作功能说明。
在程序执行的控制方面,有以下几种指令:
1. ProcCall:通过带变量的例行程序名称调用例行程序返回原例行程序。
2. IF:如果条件满足,则执行一条指令。
3. FOR:根据指定的次数,重复执行对应的程序。
4. WHILE:不断重复执行对应的程序,直到条件不满足。
5. GOTO:根据条件跳转到例行程序内标签的位置。
6. Stop:停止程序执行。
7. Break:中止当前程序的运行并将程序指针复位到主程序的第一条指令。
除了程序的控制外,RAPID程序还包括以下功能指令:
1. 数学运算指令:包括加减乘除、取余、取整、求平方根等。
2. 逻辑运算指令:包括与、或、非等运算。
3. 字符串处理指令:包括字符串的连接、查找、替换等操作。
4. 数组处理指令:包括创建数组、读取元素、赋值等操作。
5. 文件处理指令:包括文件的读取、写入、关闭等操作。
6. 通讯指令:包括TCP/IP、UDP、串口通讯等操作。
除了以上功能,ABB机器人的RAPID程序还提供了丰富的系统指令和控制指令,如:
1. SysDate:获取当前系统日期。
2. SysTime:获取当前系统时间。
3. SysState:获取系统状态信息。
4. SysCtrl:系统控制指令,如启动、停止系统等。
总之,ABB机器人的RAPID程序指令丰富多样,能够满足用户对于程序编制的各种需求,同时也为实现复杂应用提供了可能。用户可根据具体的应用场景和需求选择合适的指令进行程序编写,从而实现高效、稳定的机器人控制。 若要了解具体指令的使用和参数,可以查看ABB机器人随附的光盘说明书中的详细说明。ABB机器人的RAPID程序指令将为用户带来更加便捷和高效的编程体验,助力用户实现各种复杂的机器人应用任务。
(完整 word 版)ABB 机器人实际应用中的指令说明
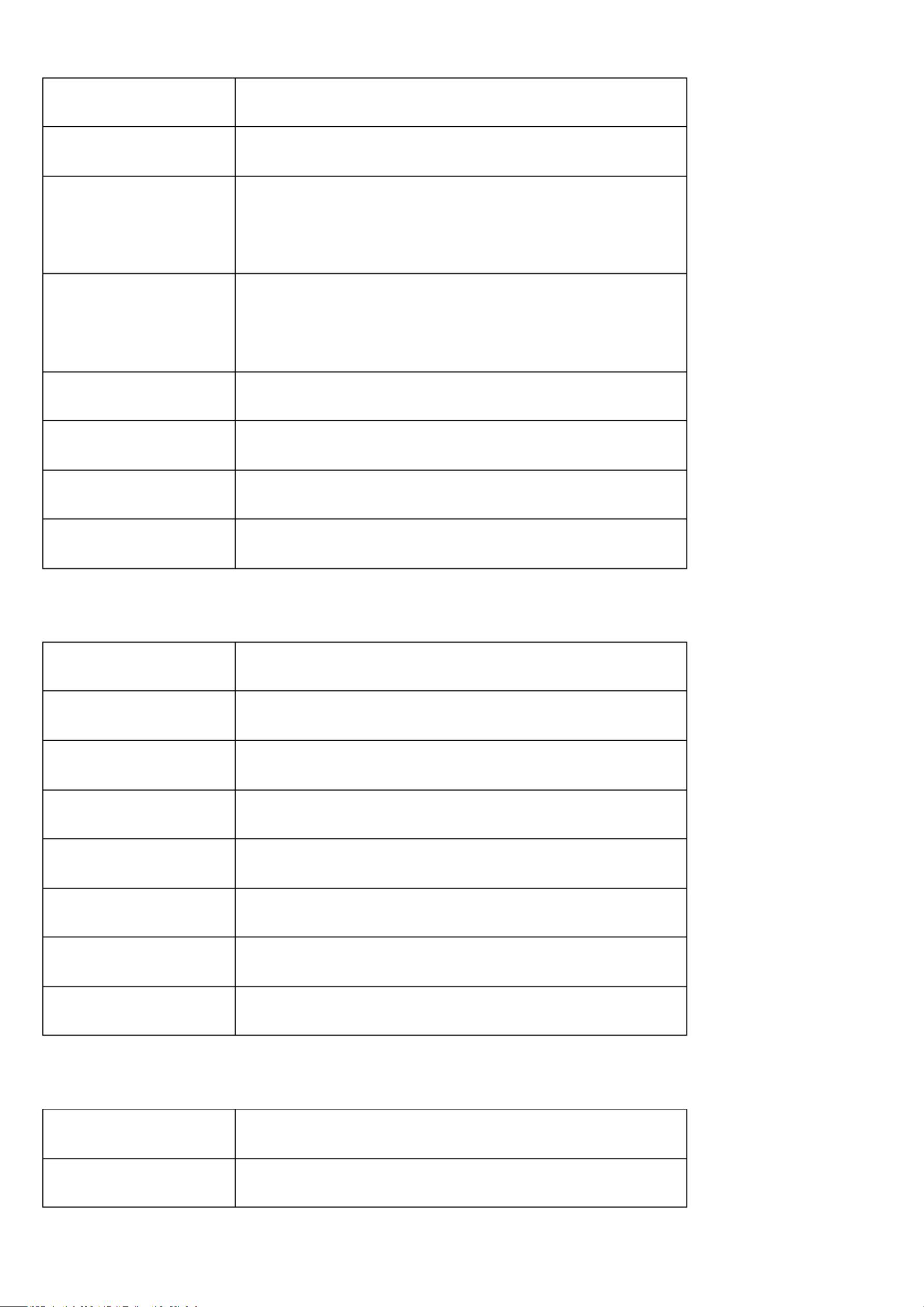
UnLoad
从运行内存中卸载一个程序模块
在程序执行的过程中,加载一个程序模块到运行内
存中
当 Start Load 使用后,使用此指令将程序模块连
接到任务中使用
CancelLoad
CheckProgRef
Save
取消加载程序模块
检查程序引用
保存程序模块
EraseModule
从运行内存删除程序模块
5、变量功能
TryInt
判断数据是否是有效的整数
读取当前机器人的操作模式
读取当前机器人程序的运行模式
OpMode
RunMode
NonMotionMode 读取程序任务当前是否无运动的执行模式
获取一个数组的维数
Present
IsPers
IsVar
读取带参数例行程序的可选参数值
判断一个参数是不是可变量
判断一个参数是不是变量
6、转换功能
StrToByte
ByteTostr
将字符串转换为指定格式的字节数据
将字节数据转换成字符串
剩余14页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2023-04-03 上传
2023-04-03 上传
2023-09-14 上传
2023-04-03 上传
2023-04-03 上传
2023-07-11 上传

想要offer
- 粉丝: 4073
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







