"基于图优化的移动机器人SLAM算法研究及应用"
需积分: 0 144 浏览量
更新于2024-01-01
收藏 4.41MB PDF 举报
本文主要研究了基于图优化的移动机器人SLAM算法。随着科学技术的不断迭代推进,制造业、运输业及先进农业等领域的设施集群化、设备自动化趋势愈发明显,机器人产业进入了前所未有的迅猛发展阶段。本文以轮式移动机器人为研究对象,通过对SLAM算法的分析和探讨,提出了一种基于图优化的移动机器人SLAM算法,并进行了相关实验验证。
首先,本文对移动机器人SLAM算法的发展历程进行了回顾和总结。SLAM(Simultaneous Localization and Mapping)即同时定位与地图构建,是移动机器人领域的一个重要研究课题。随着传感器技术和计算能力的不断提升,SLAM算法在实际应用中得到了广泛的推广和应用。本文对SLAM算法的基本原理和常见方法进行了介绍,为后续的研究奠定了基础。
其次,本文针对传统SLAM算法存在的精度不高、计算复杂度高等问题,提出了基于图优化的移动机器人SLAM算法。该算法基于因子图的优化框架,将SLAM问题转化为图优化问题,通过对传感器数据进行处理和融合,实现对机器人轨迹和环境地图的精准构建。同时,本文还对算法的数学模型和优化方法进行了详细的推导和分析,为算法实现和理论研究提供了理论支持。
接着,本文设计并实现了基于图优化的移动机器人SLAM算法的算法框架,并针对不同的传感器数据和环境条件进行了仿真实验和实际测试。实验结果表明,该算法能够有效提高SLAM的定位精度和地图构建的准确性,具有较好的实用性和稳健性。同时,算法在计算效率和实时性方面也取得了较好的表现,满足了移动机器人SLAM算法在实际应用中对于实时性和高精度的要求。
最后,本文对基于图优化的移动机器人SLAM算法进行了全面的总结和展望,并指出了未来的研究方向。基于图优化的移动机器人SLAM算法不仅在理论上有着较好的基础和发展前景,而且在实际应用中也具有广阔的应用前景和市场需求。未来的研究将继续围绕算法的优化和改进展开,进一步提高算法的稳定性和鲁棒性,推动移动机器人SLAM算法在智能制造、智能交通等领域的广泛应用和推广。
综上所述,本文通过对基于图优化的移动机器人SLAM算法的研究和实现,为移动机器人在复杂环境下实现自主定位和地图构建提供了新的思路和方法。该算法具有较好的实用性和稳定性,对于推动移动机器人技术的发展和应用具有重要的意义。希望本文的研究成果能够为相关领域的研究者和工程师提供参考和借鉴,共同推动移动机器人技术的发展和创新。

中北大学学位论文
6
(d)布科思定位导航系统 (e)思岚科技定位导航解决方案 (f)斯坦德 Massif 巡检机器人
续图 1.1 国内成熟激光导航系统及应用
1.3 论文主要工作和内容安排
论文以 WMR(Wheeled Mobile Robot,轮式移动机器人)导航任务需求及其典型工况
作为出发点,在适当借鉴相近领域技术设计规范的基础上
[49]
,深入研究了以激光雷达为
主要传感器的开源算法,实现了以图优化为框架的二维 SLAM 算法。本文算法在保证地
图构建精度的基础上,也兼顾了实时性,同时还具有对硬件资源占用小、回环鲁棒性强
的优点。文章主要结构安排如下:
第一章以讨论智能移动机器人所需要完成的任务为出发点,引出了相关的导航方案
及其发展进程。在明确导航任务的基础上,归纳了作为先决条件的 SLAM 技术。在对比
以激光雷达和视觉传感器作为主要环境感知元件的两种 SLAM 算法的优缺点的情况下,
阐明了激光 SLAM 技术发展的可行性与必要性。继而在归纳总结国内外 SLAM 技科发
展的历史进程基础上,针对目前行业相关落地成果及研发趋势,对论文的主要内容、研
究意义和论文结构进行了简要说明。
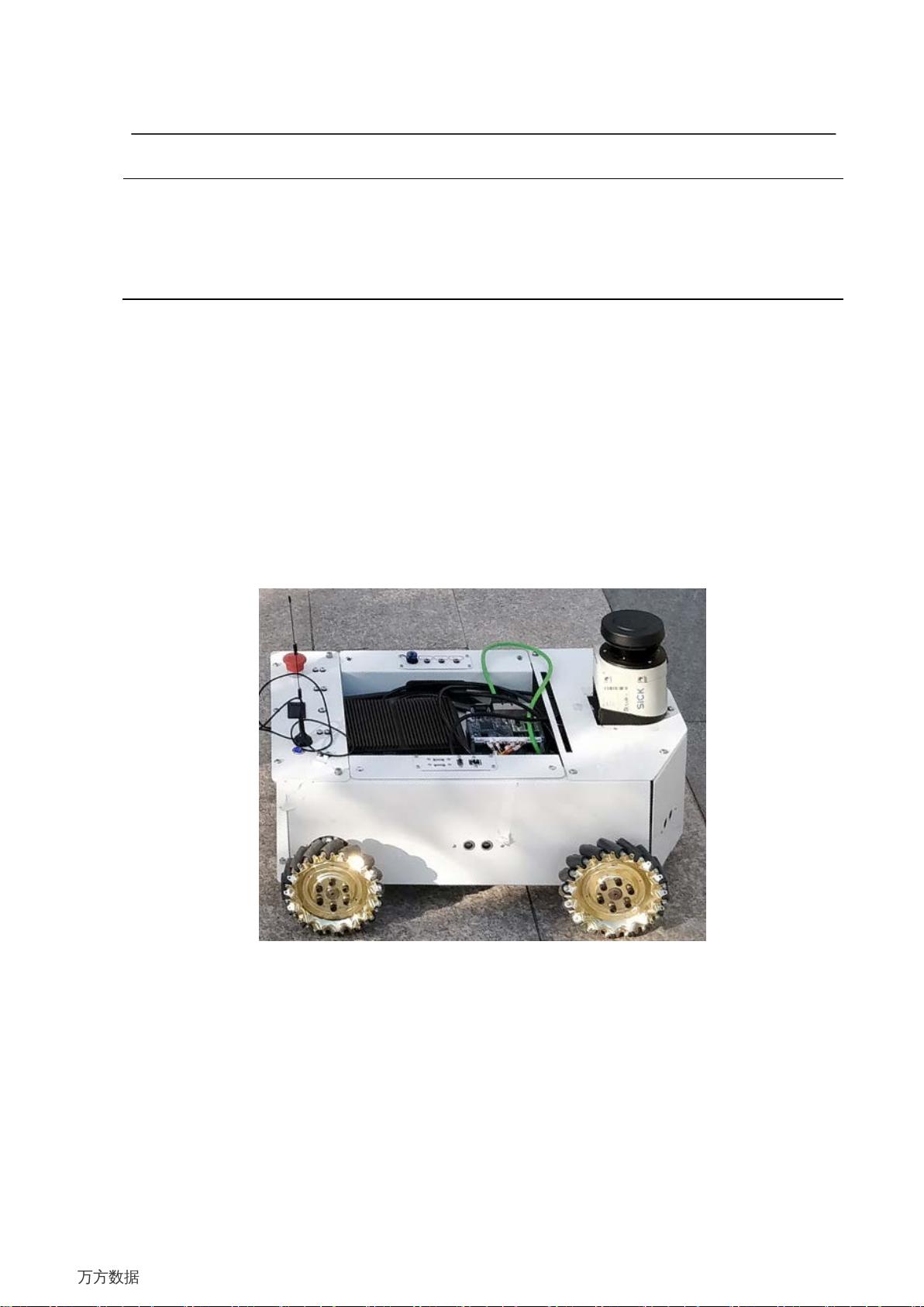
第二章针对 WMR 实际使用工况,提出了基于麦克纳姆轮的全向移动底盘方案,并
在该方案基础上采用低成本嵌入式控制板+工控机的搭配,用以实现对底层硬件的驱动
及对服务器软件的资源访问。对 SLAM 问题求解所需的传感器元件,如激光雷达、惯性
测量单元等进行了简要介绍。也对全向移动底盘的运动学模型及里程计航迹推算公式进
行了详细推导。
第三章在 SLAM 问题的概率基础上进行了公式化推断。在 结合 WMR 运动模型与观
测模型基础上,使用概率推断将 SLAM 问题等价为因子图下求解状态变量的最大后验概
万方数据

剩余88页未读,继续阅读
2022-08-04 上传
2022-08-03 上传
2022-08-03 上传
2019-10-11 上传
2022-08-03 上传
2022-08-03 上传
2022-08-03 上传
2018-08-27 上传
点击了解资源详情

型爷
- 粉丝: 24
- 资源: 337
 我的内容管理
展开
我的内容管理
展开







最新资源
- JavaScript实现的高效pomodoro时钟教程
- CMake 3.25.3版本发布:程序员必备构建工具
- 直流无刷电机控制技术项目源码集合
- Ak Kamal电子安全客户端加载器-CRX插件介绍
- 揭露流氓软件:月息背后的秘密
- 京东自动抢购茅台脚本指南:如何设置eid与fp参数
- 动态格式化Matlab轴刻度标签 - ticklabelformat实用教程
- DSTUHack2021后端接口与Go语言实现解析
- CMake 3.25.2版本Linux软件包发布
- Node.js网络数据抓取技术深入解析
- QRSorteios-crx扩展:优化税务文件扫描流程
- 掌握JavaScript中的算法技巧
- Rails+React打造MF员工租房解决方案
- Utsanjan:自学成才的UI/UX设计师与技术博客作者
- CMake 3.25.2版本发布,支持Windows x86_64架构
- AR_RENTAL平台:HTML技术在增强现实领域的应用
