乐高机械臂运动建模与控制编程详解
版权申诉
94 浏览量
更新于2024-08-21
收藏 932KB PDF 举报
本资源是一篇关于乐高机械臂运动建模与控制的详细研究论文。首先,作者介绍了如何通过实物搭建环节,按照图纸精确构建乐高机械臂的底座和各个关节,确保相邻关节的对齐,以便后续的理论分析和计算。在搭建完成后,文章进入了关键的建模分析阶段,这里采用了 Denavit-Hartenberg (D-H) 方程来描述机器臂的运动学模型。
D-H方法是一种经典的方法,用于确定机器人关节坐标系之间的变换矩阵,从而得到正运动学方程,即机器臂末端位置和旋转的函数关系。由于机械臂有三个自由度,逆运动学问题变得尤为重要,因为不能完全控制末端的姿态。通过一系列矩阵运算,作者推导出了逆运动学方程,这些方程用于确定输入关节角度,以达到预定的末端位置和姿态。
在编程实现部分,作者利用MATLAB编写了代码,通过给定期望位置坐标(例如n=20, o=15, a=0),计算出所需关节的角度值。值得注意的是,考虑到实际机械结构,前两个关节使用齿轮和涡轮传动,因此需要计算出相应的等效传动比。具体来说,关节一的传动比为1:72,关节二的传动比为1:168。在执行过程中,作者注意到由于齿轮的相对运动,实际转动角度可能会略有偏差,需要通过计算调整伺服电机的转动角度以实现精确控制。
这篇论文提供了一个完整的流程,从物理搭建到数学建模,再到编程控制,对于理解和操作乐高机械臂的运动控制具有很高的参考价值。通过学习和实践,读者可以掌握如何用数学工具精确地设计和操控这种类型的机器人系统。
机械臂运动控制实验
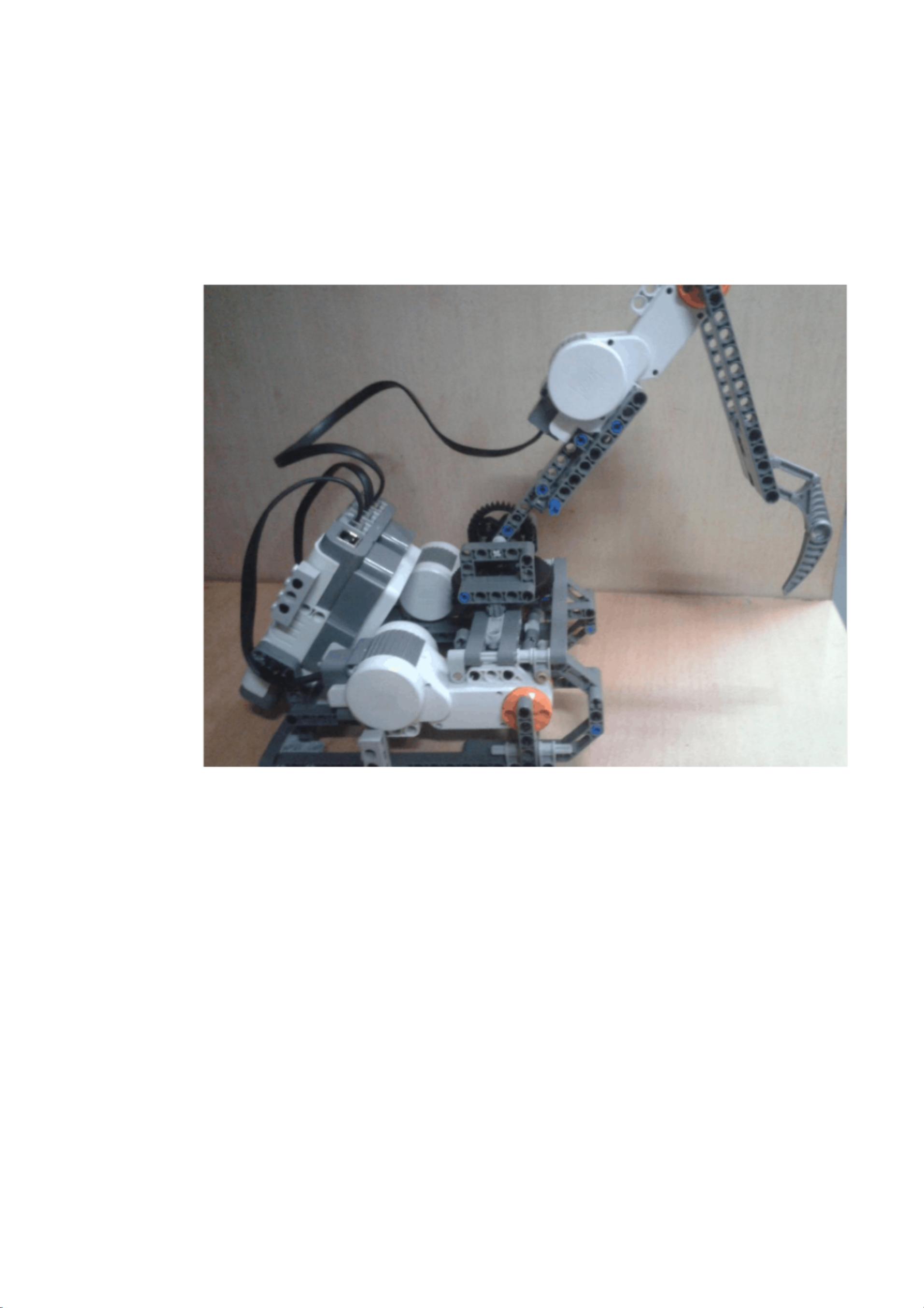
一、实物搭建
利用搭建图纸搭好底座部分之后,搭建相应的臂。搭建时确保相邻关节
中心与连杆在一条直线上,方便分析与计算。
最终搭建图 1 所示。
图 1
二、建模分析
利用 D-H 方程对机器臂进行分析, 首先对于机器臂每个关节建立坐标系
如图 2 所示。
下载后可阅读完整内容,剩余5页未读,立即下载
359 浏览量
1847 浏览量
152 浏览量
243 浏览量
346 浏览量
2024-12-29 上传
319 浏览量
2025-01-26 上传
530 浏览量

Jason–json
- 粉丝: 38
 我的内容管理
展开
我的内容管理
展开







最新资源
- Openaea:Unity下开源fanmad-aea游戏开发
- Eclipse中实用的Maven3插件指南
- 批量查询软件发布:轻松掌握搜索引擎下拉关键词
- 《C#技术内幕》源代码解析与学习指南
- Carmon广义切比雪夫滤波器综合与耦合矩阵分析
- C++在MFC框架下实时采集Kinect深度及彩色图像
- 代码研究员的Markdown阅读笔记解析
- 基于TCP/UDP的数据采集与端口监听系统
- 探索CDirDialog:高效的文件路径选择对话框
- PIC24单片机开发全攻略:原理与编程指南
- 实现文字焦点切换特效与滤镜滚动效果的JavaScript代码
- Flask API入门教程:快速设置与运行
- Matlab实现的说话人识别和确认系统
- 全面操作OpenFlight格式的API安装指南
- 基于C++的书店管理系统课程设计与源码解析
- Apache Tomcat 7.0.42版本压缩包发布
