SqueezeSeg论文解读:3D激光雷达点云道路目标语义分割
需积分: 0 167 浏览量
更新于2024-06-30
收藏 2.77MB PDF 举报
"本周的工作重点是对三维激光雷达点云进行道路目标的语义分割研究,主要涉及SqueezeSeg论文的阅读、服务器环境配置、Python基础知识和深度学习的学习。此外,还提到了使用GTA-V游戏生成激光雷达模拟数据来增强训练。"
在自动驾驶领域,3D激光雷达(LiDAR)点云的语义分割是一项关键任务,它涉及到对环境的精细化理解,包括识别汽车、行人、自行车等目标。SqueezeSeg是一种端到端的方法,将这个问题转化为逐点分类问题,采用卷积神经网络(CNN)处理原始点云数据,并结合条件随机场(CRF)进行后处理,以提升分割的准确性。CNN模型直接接受激光雷达点云作为输入,输出逐点的标签,而CRF则通过递归层进一步优化结果。在训练阶段,利用了KITTI数据集的点云和标注,并通过在GTA-V游戏中生成的模拟激光雷达数据扩充训练集,这有助于提高模型对真实世界数据的泛化能力。
服务器环境配置方面,采用了Anaconda来创建和管理虚拟环境,确保项目的可复现性和资源隔离。Python是实现这些任务的基础,特别是Numpy和SciPy库,它们提供了高效的数值计算和科学计算功能。Numpy支持多维数组操作,广播机制允许不同形状的数组进行运算;SciPy则提供了更广泛的科学计算工具,如统计、优化、信号处理等。此外,深度学习的入门学习通常会从李飞飞教授的CS231n课程开始,该课程涵盖了卷积神经网络等基础概念。
在接下来的一周,计划继续深入阅读SqueezeSeg论文并进行翻译,进一步巩固Python、Numpy等相关技能,同时探索更多深度学习的实践应用,以优化道路目标的识别和分割性能。这个过程中,Matplotlib可能会被用于数据可视化,帮助理解和调试模型的输出。
总结来说,这一周的工作集中于理论学习和实践操作,通过理解和实现SqueezeSeg,深化了对3D激光雷达点云处理和深度学习的理解,同时也提升了在服务器环境中进行科研工作的能力。下周将继续深化这些主题,为实现高效、准确的自动驾驶感知系统打下坚实基础。
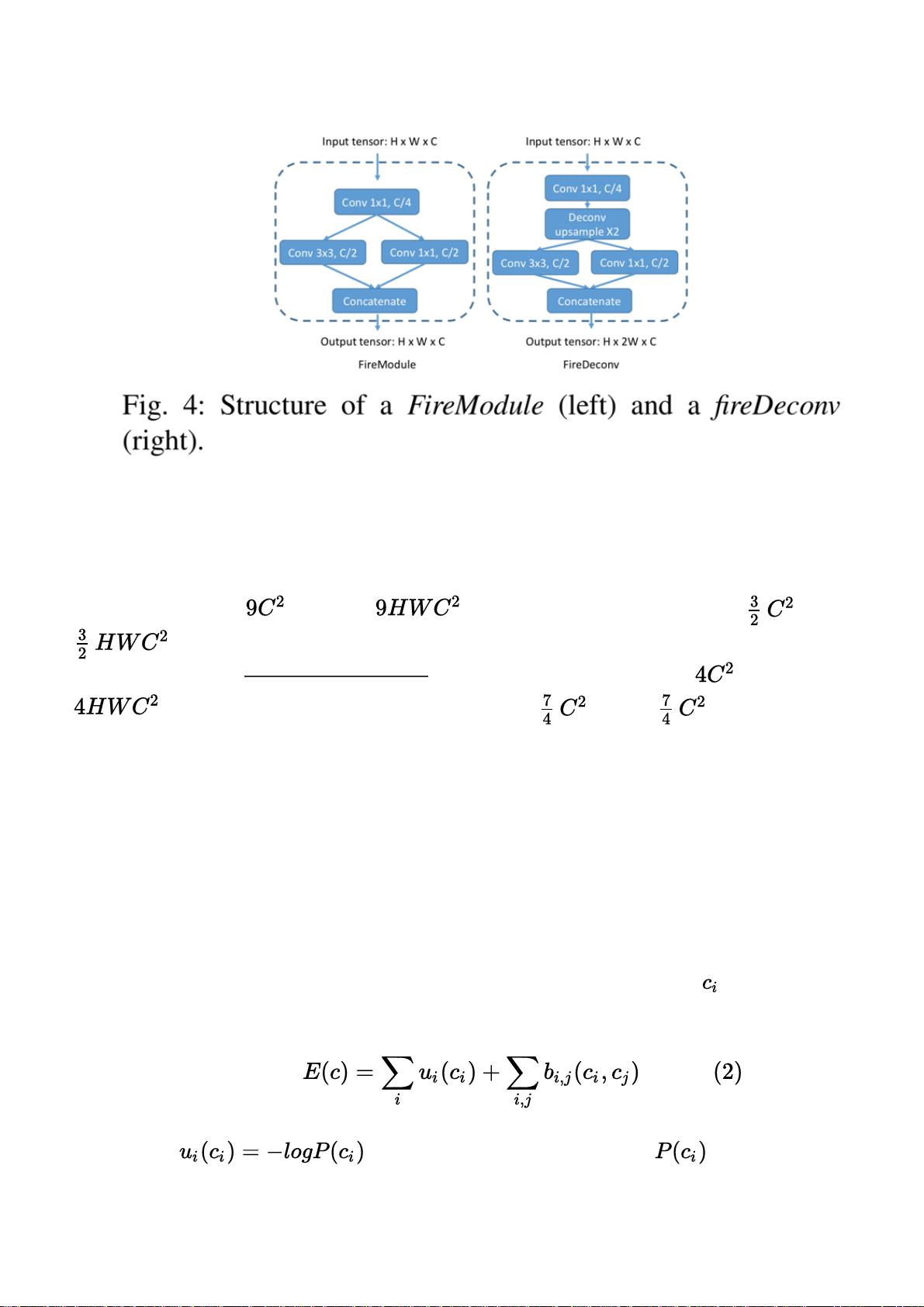
在fireModule中,大小为H×W×C的输入张量首先被馈入1x1卷积,以将信道大小减小到
C/4。接下来,使用3x3卷积来融合空间信息。与并行1x1卷积一起,它们恢复C的通道大小。
输入1x1卷积称为挤压层,并行1x1和3x3卷积合称为扩展层。给定匹配的输入和输出大
小,3x3卷积层需要 参数以及 的运算量,而fireModule只需要 参数和
的计算。在fireDeconv模块中,用于对特征贴图进行上采样的解卷积图层位于挤
压和扩展图层之间。要将宽度尺寸上采样2,常规的1x4反卷积层必须包含 参数和
计算。然而,使用fireDeconv,我们只需要 参数和 计算。
C. 条件随机场
通过图像分割,CNN模型预测的标签图往往具有模糊的边界。 这是由于在下采样操作(例如
最大池)中丢失了低级细节。 SqueezeSeg中也观察到类似的现象。
准确的逐点标签预测不仅需要了解对象和场景的高级语义,还需要了解低级细节。 后者对于
标签分配的一致性至关重要。 例如,如果云中的两个点彼此相邻并且具有相似的强度测量
值,则它们可能属于同一对象并因此具有相同的标签。 在10之后,我们使用条件随机场
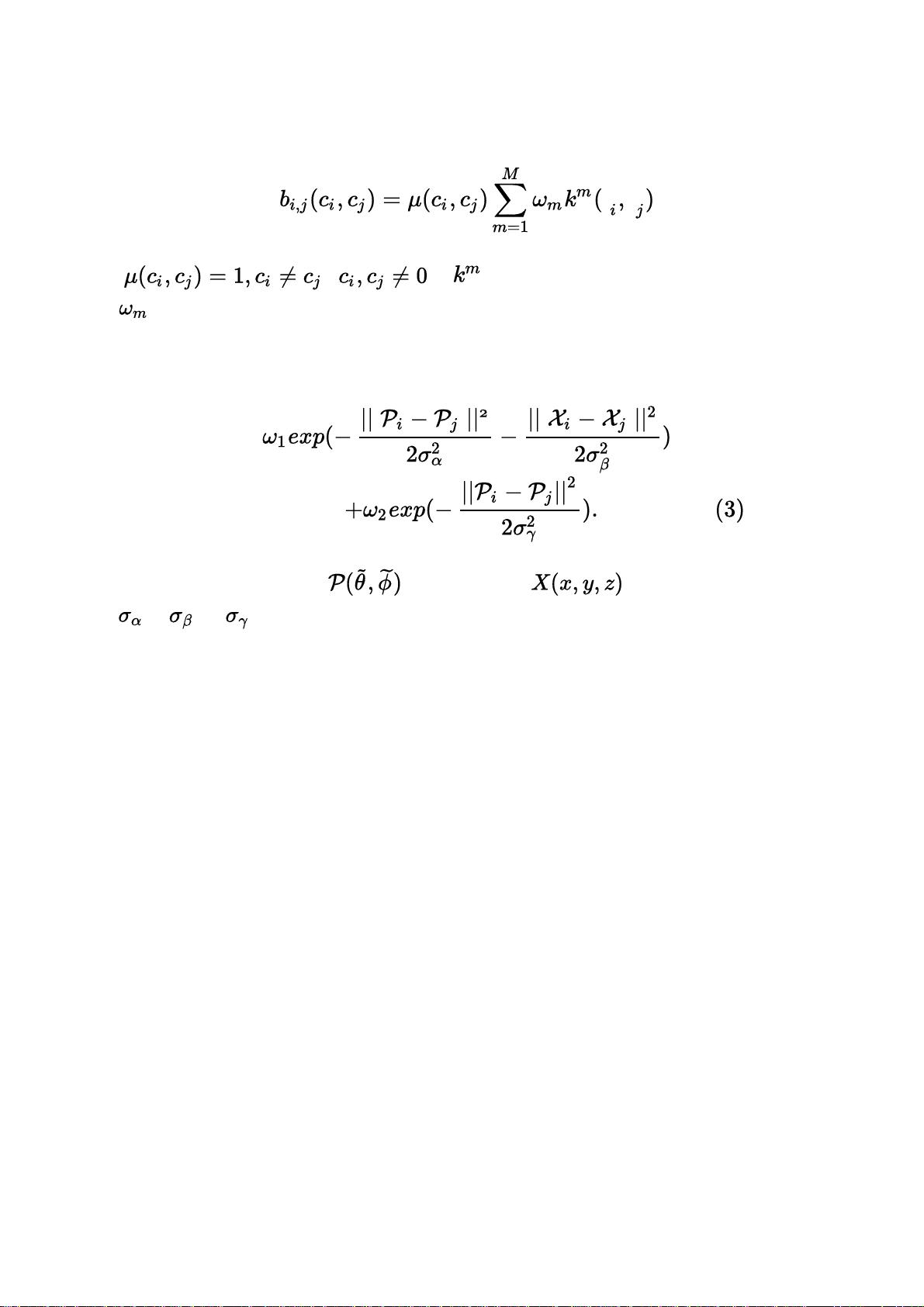
(CRF)来细化由CNN生成的标签图。 对于给定的点云和标签预测c,其中 表示第i个点的预
测标签,CRF模型使用能量函数:
一元多项式 考虑来自CNN分类器的预测概率 。二元多项式定义
剩余36页未读,继续阅读
2021-09-29 上传
2022-01-10 上传
2021-12-04 上传
2021-11-15 上传
2020-12-12 上传
2021-09-08 上传
2020-12-17 上传

今年也要加油呀
- 粉丝: 26
- 资源: 312
 我的内容管理
展开
我的内容管理
展开







最新资源
- VxWorks操作系统板级支持包的设计与实现
- Vx Works环境下串口驱动程序设计
- Vx Works环境下IP-CATV网关驱动程序的设计与实现
- Linux与VxWorks的板级支持包开发的比较与分析
- 基于公共机房安排管理系统
- ISaGRAF在SUPMAX500组态软件中的应用
- Ipv6高级套接口的研究和实现
- HTTP在嵌入式系统中的应用及扩展
- Oracle9i数据库管理实务讲座.pdf
- PL/SQL程序設計pdf格式
- CDN网络路由技术CDN网络路由技术
- 1700mm精轧机组液压AGC程序包变量监控
- 4种实时操作系统实时性的分析对比
- DOM文档对象模型(微软最近教程)
- c与c++嵌入式系统编程.pdf
- oracle傻瓜手册
