"相机标定原理与精确结果分析"
需积分: 5 180 浏览量
更新于2024-01-14
收藏 451KB DOCX 举报
单目成像原理与标定
本文主要介绍了单目相机成像原理和标定的方法。在理想情况下,相机成像可以看作是一个小孔成像模型。通过世界坐标系、相机坐标系、图像坐标系和像素坐标系之间的转换,可以得到世界坐标系到像素坐标系的映射关系。同时,考虑到畸变对成像的影响,本文还介绍了径向畸变和切向畸变,并提供了合并考虑畸变的成像模型。
相机标定是为了求取相机的内参矩阵和畸变系数,以及相机到世界坐标系的外参矩阵。本文介绍了基于标定板的标定方法,包括标定板的选择和摆放以及采集标定板图像的方法。标定步骤主要包括标定板的提取、角点的检测和相机参数的求解。最后,本文还对标定结果进行了分析和解释。
在理想情况下的相机成像模型中,像平面与相机光心之间存在一个距离,称为焦距。相机成像过程可以看作是从世界坐标系到相机坐标系的映射,再到图像坐标系,最后到像素坐标系。在考虑畸变的情况下,成像过程还需要经过畸变校正的处理。径向畸变和切向畸变是最常见的畸变形式,径向畸变会导致图像中心区域的缩放和失真,切向畸变会导致图像中的直线出现弯曲。
相机标定是通过采集不同位置和角度的标定板图像,求解相机参数的过程。标定板通常是由一系列已知尺寸的特征点组成的,可以是棋盘格、圆点阵列等。在标定过程中,首先需要提取标定板的图像,然后进行角点检测,最后利用角点的坐标和世界坐标系的对应关系,求解相机参数。标定结果包括相机的内参矩阵和畸变系数,以及相机到世界坐标系的外参矩阵。
在标定结果的分析中,可以通过重投影误差来评估标定结果的精度。重投影误差是指将世界坐标系中的三维点投影到图像坐标系中,再转换为像素坐标系,并计算重投影点与实际图像中对应点之间的距离。较小的重投影误差表示标定结果较为精确。此外,还可以通过观察畸变校正后的图像来评估标定结果的效果,如果图像中的直线变为直的,则表示校正效果较好。
在实际应用中,相机标定是非常重要的一步。准确的相机参数能够提高图像处理的精度和准确度。通过本文的介绍,读者可以了解到单目相机成像原理和标定的基本原理和方法。同时,在实际操作中,读者还需要注意标定板的摆放和采集图像的要求,以及对标定结果的分析和解释。通过合理的标定方法和准确的标定结果,可以为图像处理和计算机视觉等领域的应用提供有力支持。
4
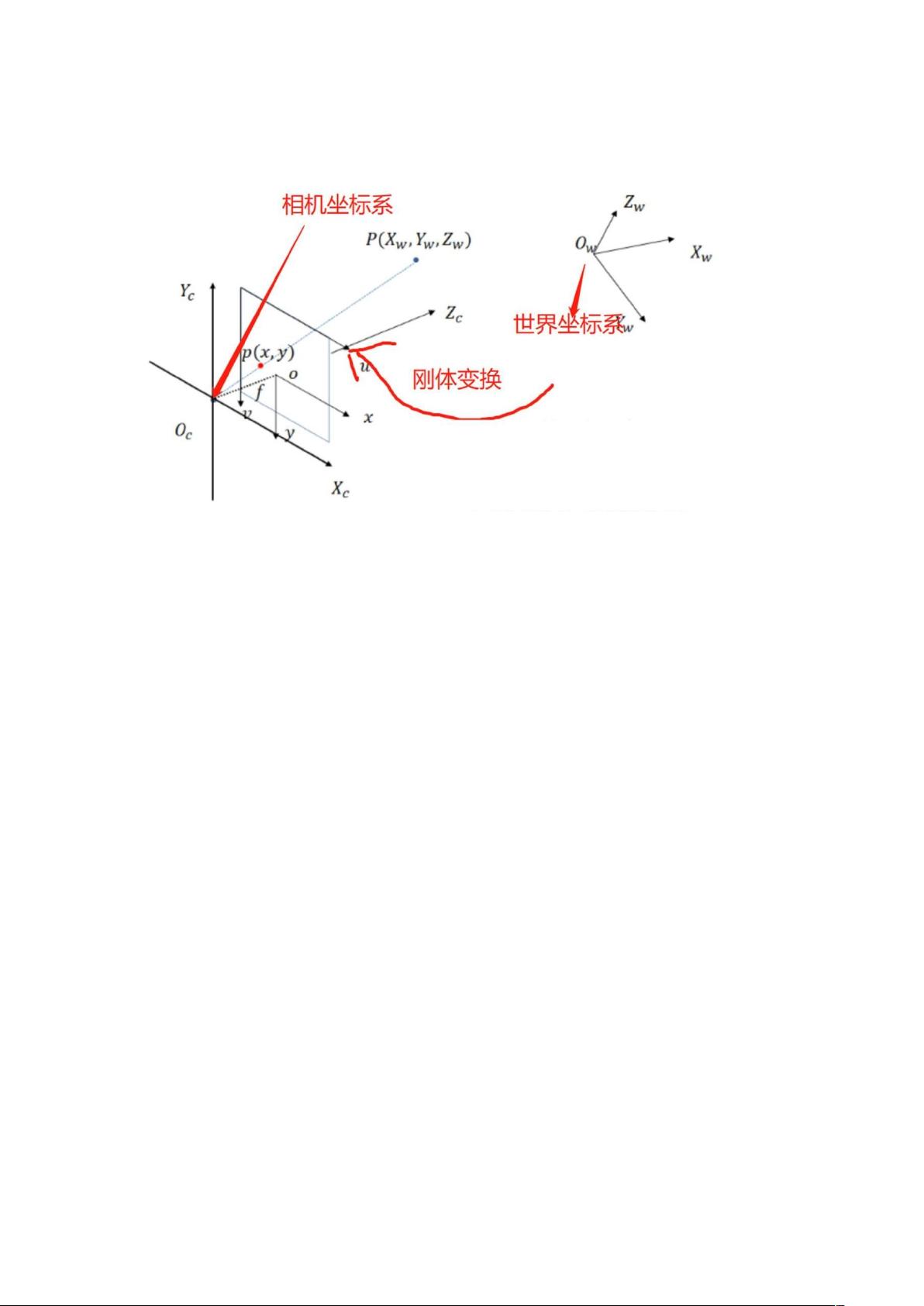
其间差⼀个刚体变换。
图 4 世界坐标系->相机坐标系(刚体变换)
剩余24页未读,继续阅读
2022-07-27 上传
2021-12-08 上传
2021-10-11 上传
2019-08-30 上传

小萌新007
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- flatlib:适用于传统占星术的Python库
- J2TEAM Security-crx插件
- EuroSAT 欧罗萨特-数据集
- twitter_data_streaming_and_visualization
- torch_sparse-0.6.11-cp38-cp38-linux_x86_64whl.zip
- mazegame.rar_Visual_C++_
- 狐族内容管理系统(iHuzuCMS) 1.0 beta12
- 粉色浪漫婚礼整站网站模板
- 有史以来最快的Amiga模块播放器-JavaScript开发
- 脑细胞组成
- WADB:通过网络进行adb(Android Debug Bridge)的简单开关
- torch_sparse-0.6.12-cp38-cp38-macosx_10_14_x86_64whl.zip
- jquery-page-load-polisher:jQuery Page Load Polisher显示一个加载器,直到页面加载为止
- 简洁绿色蔬菜整站模板下载
- Kranok-NV-数据集
- matlab2334324.rar_Windows编程_Visual_Basic_
