高效解答Top-k示例轨迹查询
172 浏览量
更新于2024-08-29
收藏 902KB PDF 举报
"Answering Top-k Exemplar Trajectory Query"
这篇研究论文主要探讨了一种新的空间文本轨迹搜索类型——Exemplar Trajectory Query (ETQ)。ETQ允许用户指定一系列要访问的地点,并对每个地点的活动提供描述。其目标是高效地找出在所有点上计算空间和文本相似度后排名前k的轨迹。与传统方法相比,这种点对点的匹配计算成本显著增加。
为了应对这一挑战,作者提出了一种增量剪枝基础方法,并探索了如何自适应地调整其策略。他们引入了基于差距的优化和新颖的两级阈值算法,以提高效率。这些方法支持对顺序敏感的ETQ,并且通过适度的扩展可以实现这一目标。
实验部分在两个数据集上验证了所提解决方案的效率和可扩展性。这表明,尽管ETQ的计算复杂性较高,但通过创新的算法设计,能够有效地处理大规模轨迹数据。这项工作对于地理位置服务、旅行推荐系统以及任何需要基于地点活动信息的轨迹搜索应用都具有重要意义。
论文中的关键知识点包括:
1. **Exemplar Trajectory Query (ETQ)**:一种新型的空间文本轨迹查询,结合了空间位置(地点)和文本描述(活动)。
2. **点对点匹配**:ETQ中每个地点的活动描述与轨迹中的对应点进行空间和文本相似度计算,这是计算成本高的主要原因。
3. **增量剪枝基础方法**:一种用于降低计算负担的策略,通过逐步排除低可能性的轨迹来加速查询过程。
4. **基于差距的优化**:通过设定一定的差距阈值,提前停止不满足条件的轨迹匹配,以提升效率。
5. **两级阈值算法**:结合一级和二级阈值,更精确地控制查询过程,进一步优化性能。
6. **顺序敏感的ETQ**:考虑轨迹中地点访问顺序的查询,这在实际应用中可能更为重要。
7. **实验验证**:在两个数据集上的实验结果证明了所提出的算法在效率和可扩展性方面的优势。
8. **应用场景**:适用于需要处理大量轨迹数据的领域,如智能交通、旅游规划和个性化推荐系统等。
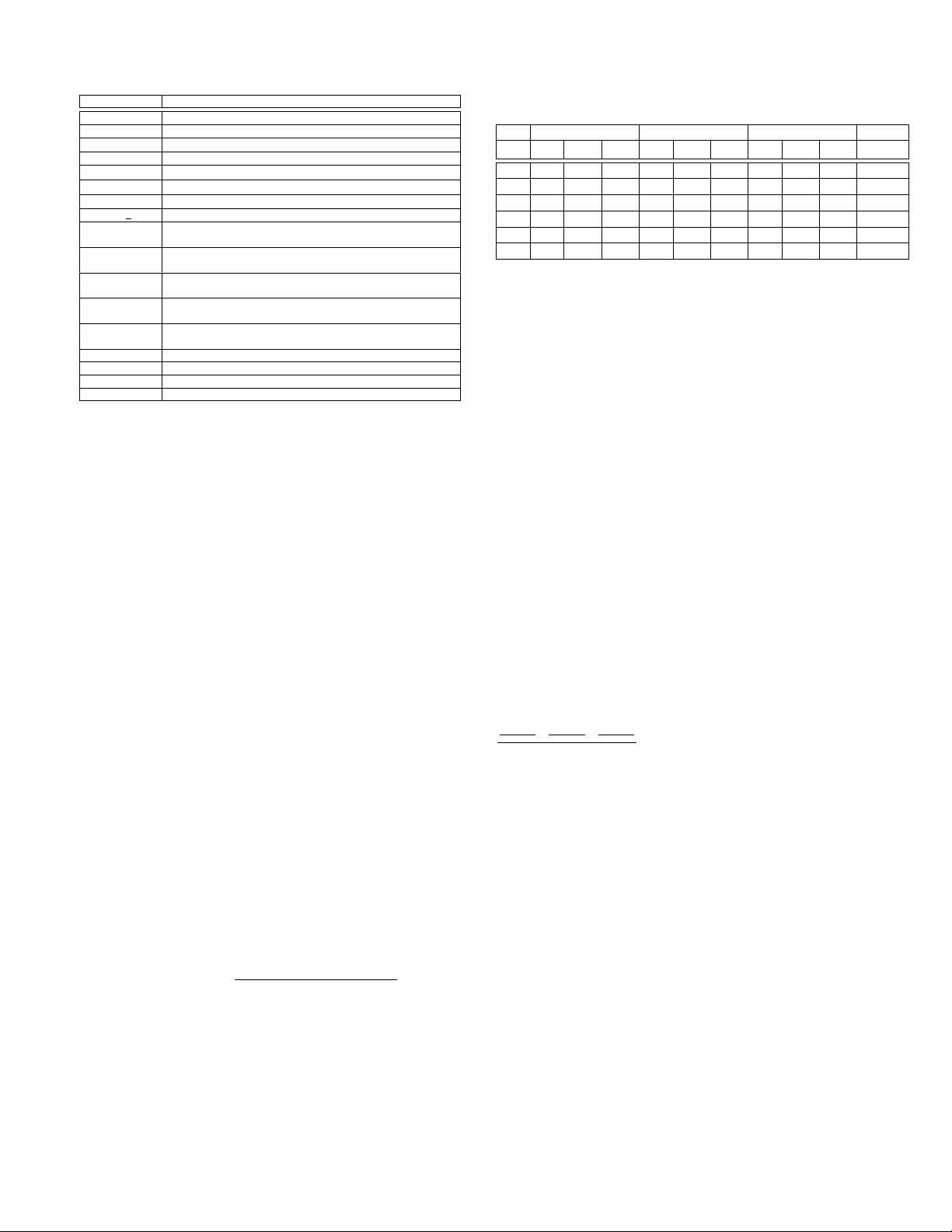
TABLE II. SUMMARY OF NOTATION
Notation Definition
T Trajectory
Q Exemplar query
ˆ
S (Q, T ) Trajectory similarity between Q and T (Definition 6)
p
i
, p
j
Points p
i
and p
j
ˆ
S
T
(p
i
, p
j
) Textual similarity between p
i
and p
j
ˆ
S
S
(p
i
, p
j
) Spatial similarity between p
i
and p
j
ˆ
S(p
i
, p
j
) Spatial-textual similarity between p
i
and p
j
unseen UB The upper bound across all unseen trajectories’ similarity
LB
seen
(Q, T )
A function returning the lower bound
of the trajectory similarity between Q and T
UB
seen
(Q, T )
A function returning the upper bound
of trajectory similarity between Q and T
BG (c)
The gap between the lower and upper
bound in the c-th round of expansion (Definition 8)
Den (q
i
)
The similarity density of the query
point q
i
in the latest round of expansion
ˆ
S
c
(q
i
)
The minimum similarity of candidate points
for q
i
in the c-th round of expansion
R
c
(q
i
) The ranked list for q
i
in the c-th round of expansion
C
tra
The set of all checked trajectories
it
max
The number of iterations to scan all points in candidate points
Spa
c
(q
i
) The similarity sparsity of q
i
in c-th expansion
Definition 1: (Point) A point p = (loc, act) is a pair
consisting of a location loc and a set of associated keywords
act = (t
1
, t
2
, . . . , t
i
) describing the loc and/or the activities at
loc.
Definition 2: (Trajectory) A trajectory T of length n is in
the form of p
1
, p
2
, . . . , p
n
, where each p
i
is a point.
Definition 3: (Query) A query Q (of size m) is a set of
points in the form of {q
1
,q
2
,. . . ,q
m
}.
The similarity between T and Q is computed between
points which share at least one common keyword. While
a query point may have multiple textwise matching points,
recalling the related work on spatial-only trajectory search,
similarity is computed from one point to another point. There-
fore, we only choose the point with the maximum spatial-
textual similarity, and add all point-to-point similarities to get
the spatial-textual similarity between query and trajectories.
Definition 4: (Point-to-Point Similarity) We define the
similarity between two points p
i
, p
j
as:
ˆ
S (p
i
, p
j
) =
0, p
i
.act ∩ p
j
.act=∅
α ·
ˆ
S
S
+ (1 − α) ·
ˆ
S
T
, otherwise
(1)
where
ˆ
S
T
(p
i
, p
j
) is the text similarity,
ˆ
S
S
(p
i
, p
j
) is the spatial
similarity between two points, and α ∈ (0, 1) is used to adjust
the relative importance of the spatial and textual similarity.
We use the sum of the textual relevance of each term [1, 18]
to measure the textual similarity, and the Euclidean distance to
measure the spatial similarity. The choice of similarity metric
is orthogonal to our query processing method (in Sec. IV).
ˆ
S
T
(p
i
, p
j
) =
X
t∈p
i
.act∩p
j
.act
γ(t) (2)
ˆ
S
S
(p
i
, p
j
) =
D
max
− Euclidean (p
i
, p
j
)
D
max
(3)
Here, γ(t) is the weight of keyword t in p
j
calculated by a
simple TF·IDF model [1]. The variable D
max
is the maximum
distance between any two unique points in geographical space,
and used to normalize the spatial scoring between 0 and 1.
Definition 5: (Point-to-Trajectory Similarity) The simi-
larity between a query point q
i
and a trajectory T is defined
as:
TABLE III. SIMILARITY TABLE BETWEEN Q AND ALL TRAJECTORIES
T
1
TO T
6
SHOWN IN FIGURE 2 BASED ON DEFINITIONS 1-6 WHERE
α = 0.5. HERE, “ID” SHOWS THE POINT POSITION IN TRAJECTORY.
q
1
q
2
q
3
Q
ID
ˆ
S
S
ˆ
S
T
ID
ˆ
S
S
ˆ
S
T
ID
ˆ
S
S
ˆ
S
T
ˆ
S
T
1
2 0.7 0.7 3 0.4 0.5 4 0.3 0.5 0.516
T
2
2 0.6 0.5 4 0.5 0.5 0.35
T
3
1 0.9 0.5 0.233
T
4
1 0.2 0.3 2 0.7 0.5 0.283
T
5
2 0.7 0.3 3 0.5 0.3 0.3
T
6
3 0.4 0.2 4 0.2 0.2 0.166
ˆ
S (q
i
, T ) = max
p
j
∈T
n
ˆ
S (q
i
, p
j
)
o
(4)
Definition 6: (Pointwise Similarity) The pointwise sim-
ilarity between T and Q is a sum of the point-trajectory
similarities between T and each point in Q, normalized by
|Q|:
ˆ
S (Q, T ) =
X
q
i
∈Q
ˆ
S (q
i
, T ) /|Q|. (5)
In trajectory T , |Q| points are chosen to compute the final
similarity between T and Q. These |Q| points form a sub-
trajectory which can be taken as a representative result, and
denoted as T
Q
.
Definition 7: (Top-k Exemplar Trajectory Query) Given
a trajectory database D = {T
1
, . . . , T
|D|
} and query Q, a
trajectory search retrieves a set R ⊆ D with k trajectories
such that: ∀r ∈ R, ∀r
0
∈ D − R,
ˆ
S(Q, r) >
ˆ
S(Q, r
0
).
Example 2: Figure 2 is an illustrative example of a query
and trajectories, showing: (a) The spatial shapes of the query
and trajectories; (b) The keywords attached to each point in T
1
;
and (c) The best match for each query point with T
1
based on
our pointwise similarity model. Further, Table III presents an
example of the similarity computations between a query Q and
the six trajectories (shown in Figure 2). For each query point,
we list the maximum similarity for every trajectory, and a blank
space means that they share no common keywords. We can
compute the similarity between Q and T
1
using
ˆ
S (Q, T
1
) =
0.7+0.7
2
+
0.4+0.5
2
+
0.3+0.5
2
3
= 0.516 and the similarities of other
trajectories are listed in the right column of the table. As we
can see, T
1
, T
2
, T
5
are the top-3 results.
IV. INCREMENTAL QUERY PROCESSING
The similarity (Definition 6) is an aggregation of spatial-
textual similarities from all query points, and is inspired by
spatial-only trajectory search [3, 11, 12, 15]. The threshold
algorithm of Fagin et al. [6] can be used directly as a filtering
framework for ranked lists. While in principle a similar idea
can be modified to suit our purposes, using the algorithm of
Fagin et al. directly does not work since the top-k list for every
point in the query is not known a priori. However another
solution, the incremental k nearest neighbor search algorithm
IKNN [3, 11, 12] can be used to fill partially ranked lists with
exactly λ nearest points for every query point. The ranked lists
can be expanded by increasing λ until all unseen trajectories
can not beat the current results. In this section, we show how
to extend IKNN from spatial-only to spatial-textual search, and
propose several bounds to terminate the expansion, which form
a baseline processing framework for ETQ.
A. Incremental Lookup Algorithm
The Incremental Lookup Algorithm (ILA) can be divided
into three steps, as shown in Algorithm 1.
剩余11页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
688 浏览量
1170 浏览量
1650 浏览量
1074 浏览量
7442 浏览量

weixin_38689976
- 粉丝: 6
- 资源: 924
 我的内容管理
展开
我的内容管理
展开







最新资源
- node-silverpop:轻松访问Silverpop Engage API的Node.js实现
- 最小宽度网格图绘制算法研究
- 多数据源事务解决方案:统一管理单应用中的多数据库
- 利用Next.js匿名浏览Reddit子板块图片
- SpringBoot+H5官网模板,覆盖多种网页资源播放
- Gitshots-server:简化开源贡献的提交记录服务
- Scrapy-Dash工具:轻松生成Scrapy文档集
- Node.js v18.12.0发布,优化Linux PPC64LE服务器性能
- 蚂蚁设计专业版快速使用指南与环境配置
- Vue.js 2.3.4源码解读及开发环境配置指南
- LDBase:Lazarus开发者的dbf数据库管理开源工具
- 高效部署WordPress的VENISON脚本教程
- Saffron Bahraman-crx插件:控制产品线的栽培与培养
- Gitpod中运行前后端应用程序的指南
- Node.js v20.3.0新版本发布 - 开源跨平台JavaScript环境
- 掌握非线性方程根的迭代求解-Matlab方法实现
