回归算法详解:机器学习基石与应用
需积分: 50 52 浏览量
更新于2024-07-19
收藏 2.23MB DOCX 举报
本文档深入总结了机器学习中常用的回归算法以及相关的核心概念。回归算法是通过数学模型找到输入特征与输出值之间关系的一种方法,主要分为线性回归和逻辑回归两类。线性回归用于处理连续数值预测,其基本模型为y = w'x + e,其中e为随机误差,满足正态分布。线性回归在工业界常用于预测任务,并在如SVM、GBDT、AdaBoost等算法中有重要应用。
逻辑回归则针对离散值或类别预测,虽然输出的是类别概率,但它也可视为回归的一种特殊形式。逻辑回归常被用于分类问题中的排序,是面试中常见的考核知识点。损失函数在此扮演关键角色,它衡量模型预测的准确度,定义为预测值与实际值的平均距离,目标是通过调整参数使损失函数减小。
梯度下降算法是优化损失函数的有效方法,它模拟下山过程,每次根据梯度方向调整参数,使得损失函数逐步降低。学习率(α)控制着更新步长,过大可能引发震荡,过小可能导致收敛缓慢。在实际应用中,通常采用自适应学习率策略,或者根据经验选择合适的固定值,如0.01。
牛顿法作为另一种优化手段,尽管计算复杂度较高,但在小数据集上表现优异。在机器学习的实际项目中,理解并熟练掌握这些基础算法及其背后的原理,对于构建高效准确的模型至关重要。无论是理论研究还是工程实践,回归算法都是机器学习不可或缺的一部分,值得深入学习和实践。
A
的维度。
3.2.2 用最小角回归法求解 Lasso 回归
第四节介绍了坐标轴下降法求解 % 回归的方法,此处再介绍另一种常用方法,>最小角回归法%
.82.4& ,>%2。在介绍最小角回归前,有两个预备算法:前向选择( 3448?& )算
法和前向梯度(344.&)算法。最小角回归% .82.4& ,>%2算法对前向梯
度算法和前向选择算法做了折中,保留了前向梯度算法一定程度的精确性,同时简化了前向梯度算法一步步迭
代的过程。
最小角回归法是一个适用于高维数据的回归算法,由于 %2 的迭代方向是根据目标的残差而定,所以该算法
对样本的噪声极为敏感。
3.3.3 总结
% 回归是在 4&. 回归的基础上发展起来的,如果模型的特征非常多,需要压缩,那么 % 回归是
很好的选择。一般的情况下,普通的线性回归模型就够了。
4.注:scikit-learn 对于线性回归提供了比较多的类库,这些类库都可以用来做线
性回归分析,重点讲述这些线性回归算法库的不同和各自的使用场景。
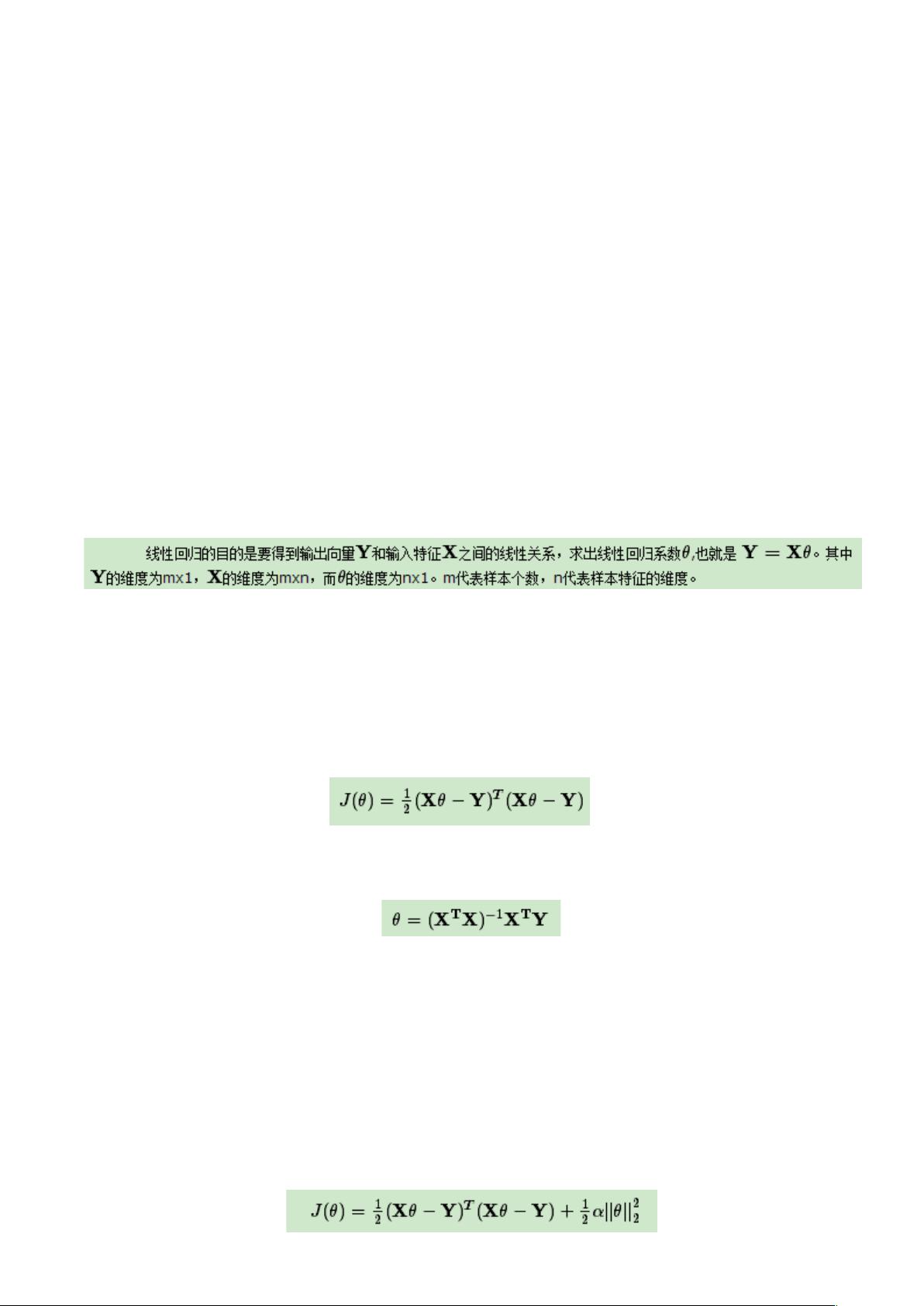
为了得到线性回归系数 ,我们需要定义一个损失函数,一个极小化损失函数的优化方法,以及一个验证算
法的方法。损失函数的不同,损失函数的优化方法的不同,验证方法的不同,就形成了不同的线性回归算法 。
?&7&B84 中的线性回归算法库可以从这三点找出各自的不同点。理解了这些不同点,对不同的算法使用场景
也就好理解了。
4.1 LinearRegression
损失函数:
%& 42.4& 类就是我们平时说的最常见普通的线性回归,它的损失函数也是最简单的,如下:
损失函数的优化方法:
对于这个损失函数,一般有梯度下降法和最小二 乘法两种极小化损失函数的优化方法,而 ?&7& 中的
%& 42.4& 类用的是最小二乘法。通过最小二乘法,可以解出线性回归系数 为:
验证方法:
%& 42.4& 类并没有用到交叉验证之类的验证方法,需要我们自己把数据集分成训练集和测试集,然后
训练优化。
使用场景:
一般来说,只要我们觉得数据有线性关系,%& 42.4& 类是我们的首先。如果发现拟合或者预测的不好,
再考虑用其他的线性回归库。如果是学习线性回归,推荐先从这个类开始第一步的研究。
4.2. Ridge
损失函数:
由于第一节的 %& 42.4& 没有考虑过拟合的问题,有可能泛化能力较差,这时损失函数可以加入正则
化项,如果加入的是 %$ 范数的正则化项,这就是 2&. 回归。损失函数如下:

剩余35页未读,继续阅读
555 浏览量
111 浏览量
104 浏览量
2203 浏览量
256 浏览量
324 浏览量

wangyawei602
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 全面详实的大学生电工实习报告汇总
- 利用极光推送实现App间的消息传递
- 基于JavaScript的节点天气网站开发教程
- 三星贴片机1+1SMT制程方案详细介绍
- PCA与SVM结合的机器学习分类方法
- 钱能版C++课后习题完整答案解析
- 拼音检索ListView:实现快速拼音排序功能
- 手机mp3音量提升神器:mp3Trim使用指南
- 《自动控制原理第二版》习题答案解析
- 广西移动数据库脚本文件详解
- 谭浩强C语言与C++教材PDF版下载
- 汽车电器及电子技术实验操作手册下载
- 2008通信定额概预算教程:快速入门指南
- 流行的表情打分评论特效:实现QQ风格互动
- 使用Winform实现GDI+图像处理与鼠标交互
- Python环境配置教程:安装Tkinter和TTk
