智能车辆视觉导航:横向模糊控制策略与仿真
3 浏览量
更新于2024-09-04
收藏 387KB PDF 举报
"该研究探讨了智能车辆视觉导航中的横向模糊控制策略,旨在解决横向控制的适应性问题。文中提出了一种基于横摆角速度和横向偏差的控制策略,通过建立横摆角速度预测模型、7自由度车辆操纵动力学模型和横向模糊推理模型来提高控制精确性并增强系统的鲁棒性和自适应性。通过仿真对比,表明该策略优于常规位置偏差控制策略。此外,还详细介绍了控制系统结构设计和横摆角速度预测模型的构建过程。"
智能车辆在视觉导航中面临的横向控制挑战是本次研究的核心关注点。传统的控制策略往往在处理环境变化和路径复杂性时表现不佳,因此,研究者提出了一种创新的横向模糊控制策略,该策略基于横摆角速度和横向偏差,以增强系统对不同条件的适应性。横摆角速度,作为车辆动态的重要指标,能反映车辆的横向运动趋势,而横向偏差则反映了车辆相对于行驶路径的位置差异。
为了实现这一策略,首先,研究者建立了横摆角速度预测模型,该模型通过车辆的实时信息预测未来的横摆角速度,以便更精确地调整车辆的运动状态。其次,构建了7自由度车辆操纵动力学模型,以全面考虑车辆在多维度的动态响应。这两个模型的结合使得系统能够更准确地理解和预测车辆的行为。
此外,引入了横向模糊推理模型,该模型利用模糊逻辑来处理不确定性和非线性问题,增强了系统的鲁棒性。模糊控制策略允许系统在面对复杂环境和不确定性时,通过调整控制规则来自适应地响应,从而提高控制精度。
控制系统结构设计包括了对预瞄点相对位置的处理,以及选择横摆角速度和横向偏差作为模糊控制器的输入,因为这两个参数直接影响车辆的横向运动。通过这样的设计,可以实时调整车辆的行驶方向,确保其更准确地遵循导航路径。
在横摆角速度预测模型的建立中,考虑到车辆横摆角速度对于轨迹控制的重要性,研究者忽略了质心偏差,简化了模型,以提高控制效果。这种方法使系统能够更加灵敏地响应横摆角速度的变化,从而更好地控制车辆的运动状态。
这项研究通过综合运用横摆角速度预测、车辆动力学模型和模糊控制,提供了一个高效且适应性强的智能车辆视觉导航横向控制策略,这对于提升自动驾驶的安全性和可靠性具有重要意义。未来的研究可能会进一步优化这些模型,以应对更复杂的道路情况和更高的驾驶需求。
智能车辆视觉导航横向模糊控制策略仿真研究智能车辆视觉导航横向模糊控制策略仿真研究
针对智能车辆视觉导航横向控制中存在的适应性问题,提出了一种基于横摆角速度与横向偏差的智能车辆横向
模糊控制策略。根据车辆于车道内的位置状态信息,建立了横摆角速度预测模型、7自由度车辆操纵动力学模型
以及横向模糊推理模型。仿真结果表明,与常规位置偏差控制策略相比较,采用横向模糊控制策略不仅能提高
智能车辆横向控制的精确性,并且具有很好的鲁棒性和自适应性。
随着汽车电子技术的飞速发展,国内外众多学者对
[1]
。国内外关于横向控制策略的研究主要集中在以下方面:参考文献[2]
以车辆与路径上近点作为基准点,结合自适应PID算法和
为了大幅提高智能车辆视觉导航过程中横向控制的精度,进一步减少路径弯度、预瞄距离等因素的影响,本文建立了横摆
角速度预测模型、车辆7自由度操纵动力学模型,结合系统辨识的方法,提出了一种横摆角速度与横向偏差的智能车辆横向模
糊控制策略。仿真结果验证了本文所提出的智能车辆视觉导航横向模糊控制策略的有效性和良好的适应性。
1 控制系统结构设计控制系统结构设计
[7]
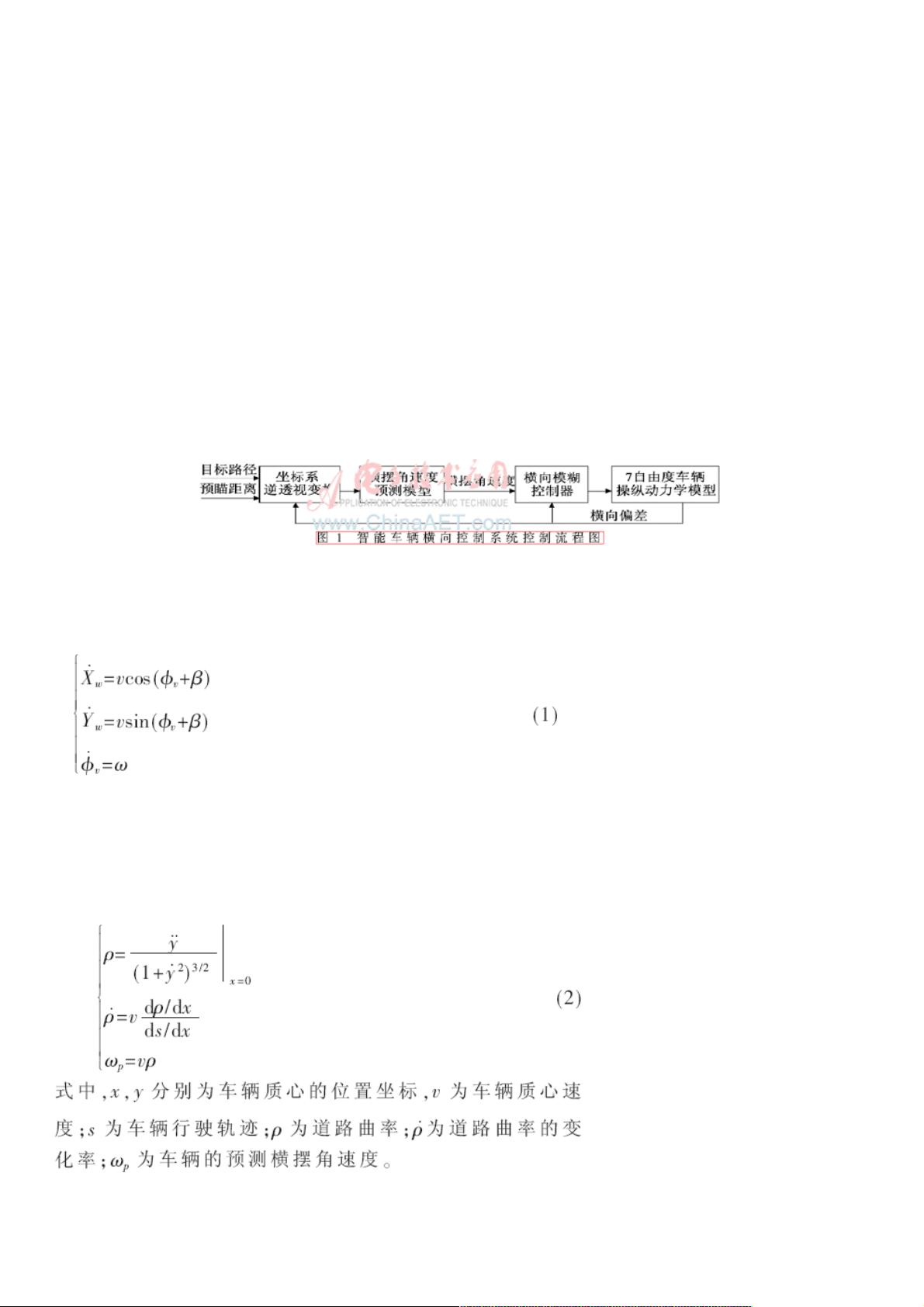
智能车辆视觉导航横向模糊控制策略如图1所示。根据空间几何坐标系逆透视投影转换得到的车辆预瞄点的相对位置,建立
横摆角速度预测模型以及7自由度车辆操纵动力学模型。模糊控制系统的设计中非常关键的环节即模糊控制器的输入变量的选
择,在智能车辆视觉导航过程中,车身横向运动的控制本质上即动态调整车辆相对于行驶路径的横向偏差和航向偏差这两个运
动参数。综上可知,车辆实时位姿信息必须作为重点考虑的因素,因此本文将车辆的横摆角速度和横向偏差作为模糊控制器的
两个输入项。
2 横摆角速度预测模型的建立横摆角速度预测模型的建立
[8]
假设在某一特定时刻,世界坐标系中的车辆质心坐标为(X
w
,Y
w
),车辆坐标系的纵轴线与横坐标之间的夹角为φ
v
。已知车
辆质心速度v、车辆质心侧偏角β以及车辆横摆角速度ω,则车辆动力学方程可以用下式表示:
通过式(1)不难看出,智能车辆视觉导航中的车身位置姿态与车辆横摆角速度、车辆质心速度、质心侧偏角这3个因素密切相
关。在诸多因素之中,车辆横摆角速度的变化对车辆的轨迹状态影响较大。因此可以在利用车辆质心速度变化率的基础上,通
过控制车辆的横摆角速度进一步干涉智能车辆的运动状态。
在建立横摆角速度预测模型的过程中,为了进一步提高系统的控制效果,忽略车辆运动中的质心偏差,并假设车辆一直沿
视觉导航路径行驶,运动轨迹保持不变,不发生突变,则横摆角速度可以通过下式表示:
3 车辆操纵动力学模型的建立车辆操纵动力学模型的建立
通过对车辆操纵动力学的研究分析以及根据智能车辆视觉导航过程中横向控制策略
[9]
,如图2所示。
下载后可阅读完整内容,剩余4页未读,立即下载
2022-05-24 上传
2024-09-08 上传
2023-09-11 上传
2023-05-17 上传
2023-04-02 上传
2023-03-30 上传
2023-07-08 上传
2023-04-04 上传

weixin_38500664
- 粉丝: 2
- 资源: 889
 我的内容管理
展开
我的内容管理
展开







最新资源
- 新型智能电加热器:触摸感应与自动温控技术
- 社区物流信息管理系统的毕业设计实现
- VB门诊管理系统设计与实现(附论文与源代码)
- 剪叉式高空作业平台稳定性研究与创新设计
- DAMA CDGA考试必备:真题模拟及章节重点解析
- TaskExplorer:全新升级的系统监控与任务管理工具
- 新型碎纸机进纸间隙调整技术解析
- 有腿移动机器人动作教学与技术存储介质的研究
- 基于遗传算法优化的RBF神经网络分析工具
- Visual Basic入门教程完整版PDF下载
- 海洋岸滩保洁与垃圾清运服务招标文件公示
- 触摸屏测量仪器与粘度测定方法
- PSO多目标优化问题求解代码详解
- 有机硅组合物及差异剥离纸或膜技术分析
- Win10快速关机技巧:去除关机阻止功能
- 创新打印机设计:速释打印头与压纸辊安装拆卸便捷性
