深度学习SLAM系统DROID-SLAM:单目、立体及RGB-D相机的视觉定位与映射
需积分: 20 200 浏览量
更新于2024-07-09
收藏 10.61MB PDF 举报
"DROID-SLAM是一种基于深度学习的视觉SLAM系统,适用于单目、立体和RGB-D相机。该系统通过稠密束调整层进行递归迭代更新,优化相机姿态和像素级深度估计。DROID-SLAM在准确性上显著优于先前的工作,并具有更高的鲁棒性,减少了灾难性失败的发生。它能够在训练时使用单目视频,但在测试时能利用立体或RGB-D视频提高性能。开源代码可在https://github.com/princeton-vl/DROID-SLAM找到。"
本文重点介绍了DROID-SLAM这一创新的深度学习SLAM(同时定位与建图)系统,它是视觉SLAM领域的一个新进展。SLAM任务旨在构建环境地图的同时定位传感器(如机器人或自动驾驶汽车)在环境中的位置,是机器人技术,特别是自动驾驶领域的关键技术。DROID-SLAM聚焦于长期轨迹的精确追踪,是结构从运动(SfM)的一种特殊形式。
DROID-SLAM的核心在于其递归迭代更新机制,通过一个稠密束调整层来同步优化相机的姿态和图像像素级别的深度信息。这种方法能够提高对环境的理解精度,从而提升SLAM系统的整体性能。值得注意的是,尽管DROID-SLAM在训练阶段使用的是单目视频数据,但它在运行时能够灵活适应不同类型的输入,如立体或RGB-D(颜色和深度)视频,以进一步提升定位和建图的准确度。
在实际应用中,这种灵活性意味着DROID-SLAM能够在各种复杂环境中保持稳定性和准确性。与传统的SLAM方法相比,DROID-SLAM在应对光照变化、纹理稀疏和动态物体等挑战时,表现出更强的鲁棒性,大大减少了导致系统失效的情况。
通过开源代码,研究者和开发者可以深入研究DROID-SLAM的设计原理和实现细节,这将推动视觉SLAM技术的进一步发展。在自动驾驶、无人机导航、室内定位等场景中,DROID-SLAM的这些特性有望带来更可靠的定位和建图解决方案。
DROID-SLAM是深度学习技术在SLAM领域的成功应用,它不仅提高了定位的精度,还增强了系统的鲁棒性,为未来智能系统的自主导航提供了强大的工具。通过不断优化和改进,DROID-SLAM有望成为视觉SLAM领域的标准之一,对自动化和无人系统的实用化产生积极影响。
ConvGRU
DBA
ConvGRU
DBA
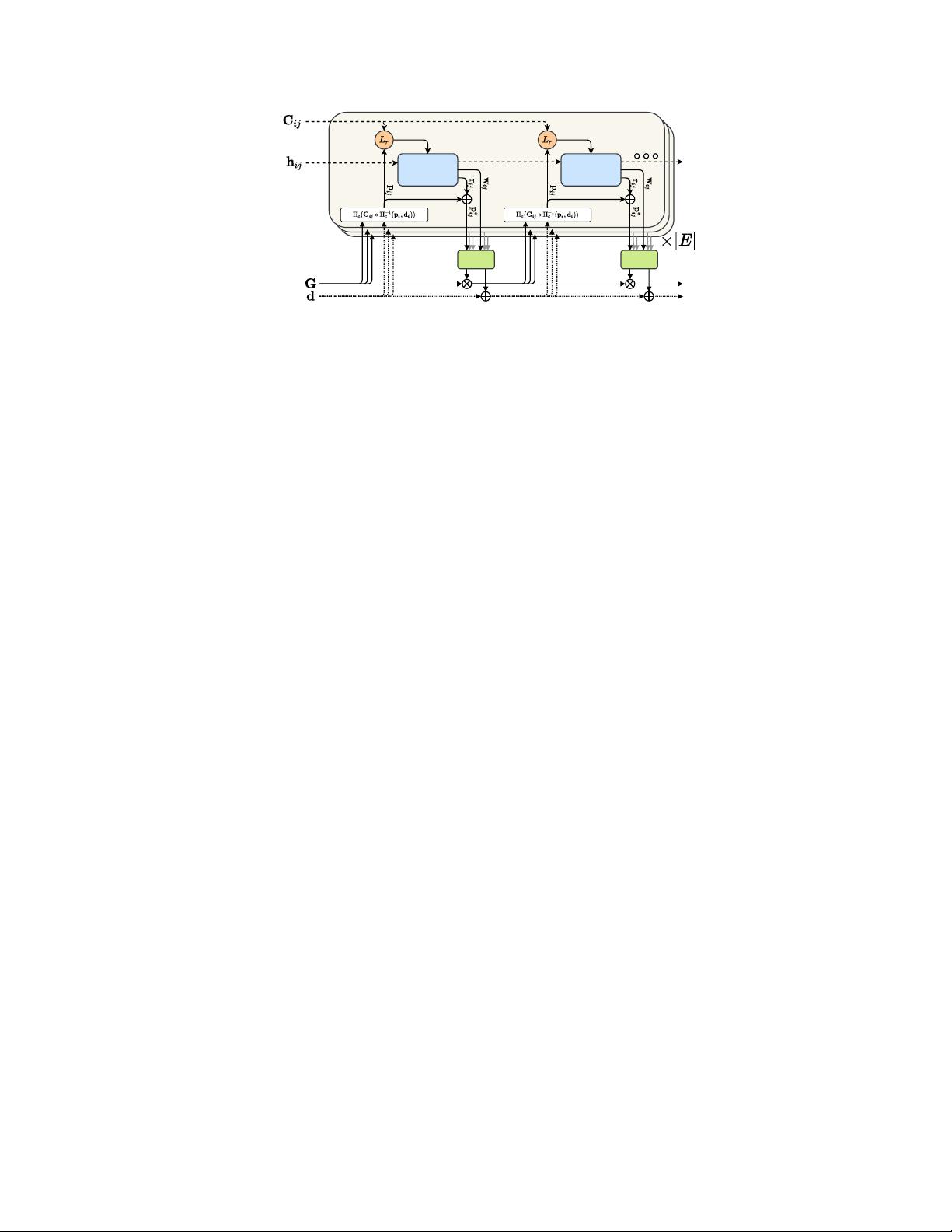
Figure 2: Illustration of the update operator. The operator acts on edges in the frame graph, predicting
flow revisions which are mapped to depth and pose update through the (DBA) layer.
visibility to update the frame graph. If the camera returns to a previously mapped region, we add
long range connections in the graph to perform loop closure.
3.1 Feature Extraction and Correlation
Features are extracted from each new image added to they system. Key components of this stage are
borrowed from RAFT[49].
Feature Extraction
Each of the input images are processed by a feature extraction network. The
network consists of 6 residual blocks and 3 downsampling layers, producing dense feature maps at
1/8 the input image resolution. Like RAFT[
49
], we use two separate networks: a feature network
and a context network. The feature network is used to build the set of correlation volumes, while the
context features are injected into the network during each application of the update operator.
Correlation Pyramid
For each edge in the frame graph,
(i, j) ∈ E
, we compute a 4D correlation
volume by taking the dot product between all-pairs of feature vectors in g
θ
(I
i
) and g
θ
(I
j
)
C
ij
u
1
v
1
u
2
v
2
= hg
θ
(I
i
)
u
1
v
1
, g
θ
(I
j
)
u
2
v
2
i (1)
We then perform average pooling of the last two dimension of the correlation volume following
RAFT[49] to form a 4-level correlation pyramid.
Correlation Lookup
We define a lookup operator which indexes the correlation volume using a
grid with radius r, L
r
: R
H×W ×H×W
× R
H×W ×2
7→ R
H×W ×(r+1)
2
.
The lookup operator takes an
H × W
grid of coordinates as input and values are retrieved from the
correlation volume using bilinear interpolation. The operator is applied to each correlation volume in
the pyramid and the final feature vector is computed by concatenating the results at each level.
3.2 Update Operator
The core component of our SLAM system is a learned update operator show in Fig. 2. The update
operator is a
3 × 3
convolutional GRU with hidden state
h
. Each application of the operator updates
the hidden state, and additionally produces a pose update,
∆ξ
(k)
, and depth update,
∆d
(k)
. The pose
and depth updates are applied to the current depth and pose estimates through retraction on the SE3
manifold and vector addition respectively
G
(k+1)
= Exp(∆ξ
(k)
) ◦ G
(k)
, d
(k+1)
= ∆d
(k)
+ d
(k)
. (2)
Iterative applications of the update operator produce a sequence of poses and depths, with the expec-
tation of converging to a fixed point
{G
(k)
} → G
∗
,
{d
(k)
} → d
∗
, reflecting the true reconstruction.
Correspondence
At the start of each iteration we use the current estimates of poses and depths to
estimate correspondence. Given a grid of pixel coordinates,
p
i
∈ R
H×W ×2
in frame
i
, we compute
the dense correspondence field p
ij
p
ij
= Π
c
(G
ij
◦ Π
−1
c
(p
i
, d
i
)), p
ij
∈ R
H×W ×2
G
ij
= G
j
◦ G
−1
i
. (3)
4
剩余15页未读,继续阅读
180 浏览量
923 浏览量
136 浏览量
228 浏览量
125 浏览量
1869 浏览量
2022-09-21 上传
122 浏览量

zeeq_
- 粉丝: 1w+
- 资源: 47
 我的内容管理
展开
我的内容管理
展开







最新资源
- 显示屏字库资料.rar
- 三碁变频器通讯测试软件.rar
- 高斯白噪声matlab代码-LDPC-4Qt:使用LDPC代码和QtC++进行前向纠错
- Enfonsar la Flota-开源
- FTB编辑器 增强版_dotnet整站程序.rar
- ls-element:Web组件的Vainilla库
- Standard Calculator with History Using HTML,
- jobs-calculator
- Chess Openings-开源
- mpfnxvbh.zip_PCS仿真模型_map
- hardware_manuals:Skyhook硬件手册
- sfg-pet-clinic:SFG宠物诊所
- 永宏 FBs主机os更新程式下载.rar
- x-postpress:用于呈现文章的Web组件
- byo-linker:构建自己的-链接器
- Goberl友情链接系统源码_搜索链接应用程序.rar
