利用邻域排序实现范围自由定位
下载需积分: 0 | PDF格式 | 4.88MB |
更新于2024-11-29
| 148 浏览量 | 举报
"range-free localization beyond connectivity, wireless sensor network"
在无线传感器网络中,位置感知是许多关键应用的基础。这些应用通常对系统的成本有严格要求,这使得许多基于范围的定位方法难以实施。另一方面,依赖于连接性的无范围定位方法可能无法充分利用相邻节点之间的距离信息。针对这一局限性,本文提出了一种创新的无范围定位方法,它超越了简单的连接性依赖,旨在从一跳邻居节点的邻域排序中捕获相对距离。
这种方法的核心思想是将邻域排序视为节点在网络中的独特高维分配签名。通过这种签名,可以推断出节点之间的相对距离,而无需进行精确的距离测量。由于这种方法对原始数据的依赖较少,因此在保持较低的额外开销的同时,能够方便地作为透明支持层应用于现有的、基于连接性的户外传感器节点定位解决方案中。
论文中介绍的设计能够显著提高定位精度,这是通过利用邻居节点之间更丰富的信息来实现的,而不仅仅是它们是否能相互通信。通过分析和实验验证,作者证明了这种方法的有效性和优于传统连接性基础定位方案的性能。此外,该方法还具有一定的鲁棒性,能够适应网络动态变化和潜在的节点故障。
总结来说,"range-free localization beyond connectivity"是一种新颖的无线传感器网络定位技术,它利用节点间的邻接关系和邻域信息,提供了一种提高定位准确性的方法。这种方法不仅降低了对硬件设备的复杂度要求,而且能够增强现有定位系统的性能,特别是在资源受限的无线传感器网络环境中。其潜在的应用场景包括环境监测、灾难响应、物联网(IoT)设备定位等,这些都需要高效且精确的节点定位能力。通过这种方式,无范围定位技术有望推动无线传感器网络在各种复杂环境下的定位服务达到新的水平。
0 16 32 48 64 80 96 112 128 144
−100
−80
−60
−90dBm
↓
RSS vs. Physical Distance in Linear Network
Distance Between Node Pairs (in feet)
RSS (in dBm)
0 16 32 48 64 80 96 112
−100
−80
−60
−90dBm
↓
RSS vs. Physical Distance in Regular 2D Network
Distance Between Node Pairs (in feet)
RSS (in dBm)
(a) System Level View: RSS vs. Physical Distance
0 5 10 15 20 25 30 35 40 45 50 55
0
0.5
1
RSS Ordering vs. Distance Ordering in Linear Network
node ID
Similarity
0 5 10 15 20 25 30 35 40 45 50
0
0.5
1
RSS Ordering vs. Distance Ordering in Regular 2D Network
node ID
Similarity
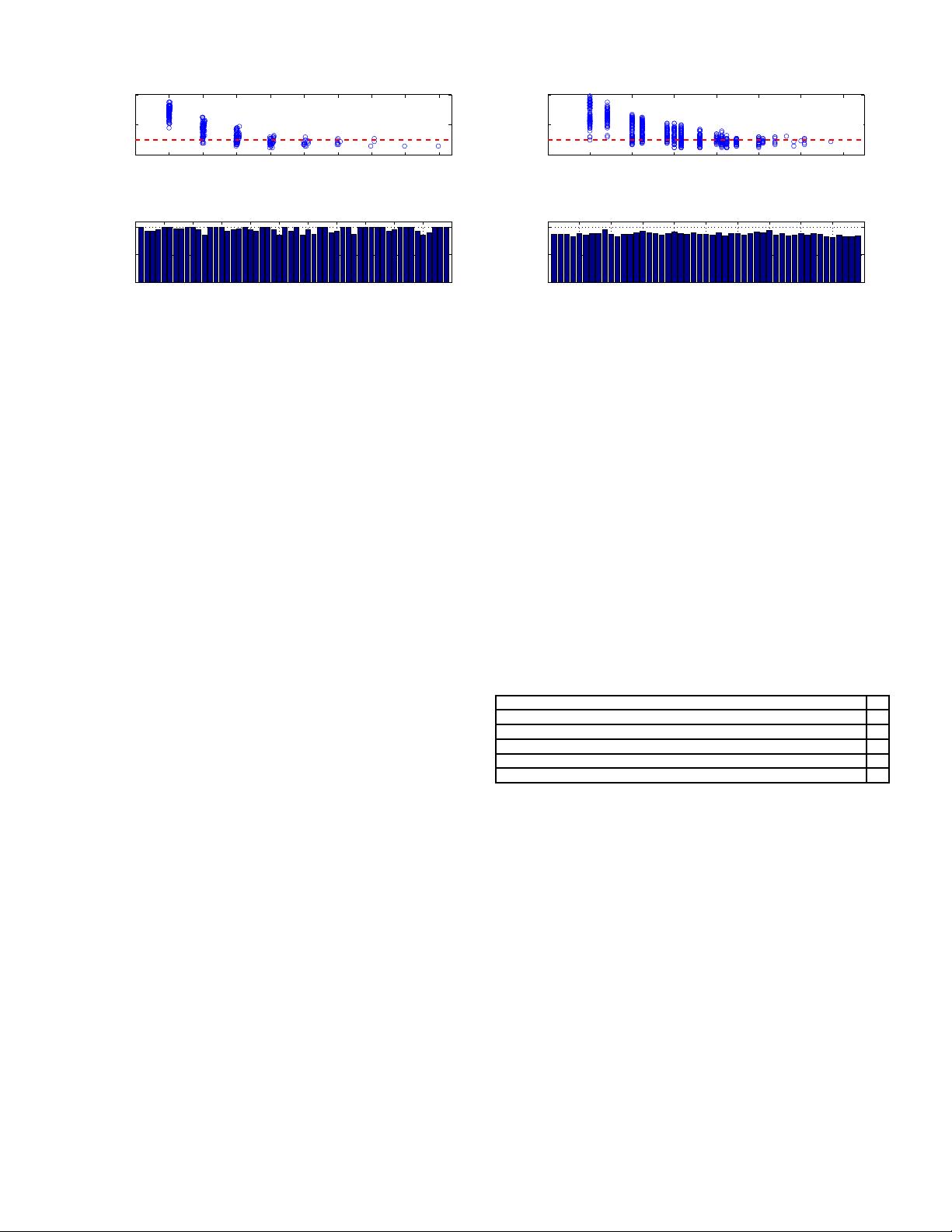
(b) Each Node’s Point of View: Feature of RSS Monotonic At tenuation
Figure 2. Empirical Date from Large Scale Experiments
viewpoint of each sensing node), RSS values mostly decreased
monotonically with increasing distance, conveying information
about relative “near-far” relationships among 1-hop neighbors.
3.2 Large-Scale Experiments
We then conducted large-scale outdo or experimen ts with two
types of networks to verify the phenomena found in the prelim-
inary test. The first experiment was a linear network containing
54 MICAz nodes with a 1 6-foot intermediate distance between
adjacent nodes covering a 850-foot length along a road. In the
second experiment, we constructed a regular 2D network with a
7×7 grid-shaped layout including 49 nodes occupying an open-
air par king lot area of 10000 square feet. The setup of the large-
scale experiments will be further detailed in Section 6.
Figure 2 reports the empirical data obtained from the two
test-beds. Figure 2(a) plots the sensed RSS value for each pair
of nodes against the distance between the m, which verifies that
monotonic RSS-distance relationship doesn’t hold for the whole
network. In both the line ar network and the regular 2D network,
on one hand, RSS may vary dramatically f or identical distance.
For example, as shown in the right sub-figure of Figure 2(a),
RSS r anges from -60dBm to -90d Bm for a 16-foot distance in
the 2D network. On the other han d, a single RSS value may cor-
respond to a wide range of distances. For instance, as shown in
the left sub-figure, -90dBm could range from 32 fee t to 112 feet
in the linear network; even worse, -90 dBm RSS covers almost
all of the distance spectrum, i.e. from 16 feet to 112 feet, in the
2D network showing in the right sub-figure of Fig ure 2(a).
However, examining the data from the viewpoint of a single
node te lls a different story. For any node u
i
, we can obtain an
ordered node list, say A, by listing u
i
’s 1-hop neigh bors accord-
ing to their RSS values sensed at u
i
in decreasing order; and
another node list, say B, by ordering u
i
’s 1-hop neighbors by in-
creasing physical distance. Ideally, if the sensed RSS decreases
monotonically with increasing distance, A and B should be ide n-
tical. We d efine the similarity between two lists A and B as the
percentage of ac c ordant node pairs between them. For exam-
ple, let A = (u
1
,u
2
,u
3
) and B = (u
1
,u
3
,u
2
), then {u
1
, u
2
} is an
accordant node pair since in both A and B, node u
1
is ordered
ahead of u
2
; while { u
2
, u
3
} is not since their ordering gets re-
versed from A to B. We can see that if A and B are consistent
with their similarity close to 1, the monotonic feature holds.
Figure 2(b) illustrates the similarity results for all nodes in
two test-beds. We can see from the left sub-figure that in the
linear network, most of the n odes have a similarity close to
1 (the min imum, mean and maximum values of similarity are
0.86, 0.96 and 1, respec tively). It means th at in the linear net-
work, from single node’s po int of view, the RSS values for 1-hop
neighbors are approximately monotonic with the distance. This
finding still holds for the 2D regular network as shown in the
right sub-figure of Figure 2(b), wh e re the minimum, mean and
maximum similarities are 0.81 , 0.88 and 0.96, respectively.
Above experimen ts confirm that (i) RSS-distance relation-
ship does not hold at the system level, but (ii) the monotonic
feature approximately holds from the viewpoint of a single node.
3.3 Analysis and Discussion
This subsection discusses why the mo notonic RSS-distance
feature could hold from the viewpoint of a single node.
In addition to the physical distance between two nodes, there
are m a ny factors that affect RSS sensing results. Table 1 lists
some major aspects. We mar ked an aspect with a “
√
” if pre-
deploy en gineering efforts could possibly be applied to reduce
its impact, or a “×” if it would be hard or c ostly to address.
Table 1. Major Factors Affecting RSS Sensing
Types of Factors P
RF Transmit Parameters: Sending Power, Frequency, Modulation, Baud Rate ...
√
Antenna Issues: Transceiver Gain, Isotropic/directioinal, Orientation, He ight .. .
√
Random Noise: Interference, Nature Events, Mobile Effects, Electronic Pulse . ..
√
Propagation Path Loss: Terrain, Vegetation, Obstac le, Magnetic Field .. . ×
Node-level Sensing Discrepancy: LNA, IF, ADC Ref. Voltage, Ground Noise ... ×
At th e sender side, besides the sending power, th e carrier
frequency, modulation, baud rate a nd etc, determine the band-
width, center frequency and spectrum shape [47], which all af-
fect the RSS at the receiver side . Most of those parameters can
be co nfigured with small offset errors and maintain relatively
stable during the run time. Antenna issues such as isotropic
gain, orientation and etc, can also be carefully engineered in the
design phase. For transient random noise, traditional filter ing
methods are able to help reduce its impact. All of the above are
considered addressable without significant in-field calibra tion.
On the contrary, unpredictable e nvironmental factors are
much harder to handle. For example, radio path loss is unknown
and costly to profile in most cases because it is temporally dy-
namic and spatially unevenly distributed. Another difficult is-
sue is the sensing discrepancy among nodes. At the receiver
side, RSS sensing results are sensitive to small variance among
different nodes. For examp le , a tiny bias at the reference volt-
age of ADC or small variance of the LNA (low noise amplifier)
gain caused by different ground noise levels, may lead to dif-
ferent RSS values at two nodes even when their received signal
strengths are equivalent. Runtime sensing discr epancy among
剩余13页未读,继续阅读
相关推荐




jzkstc
- 粉丝: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB实现ART与SART算法在医学CT重建中的应用
- S2SH整合版:快速搭建Struts2+Spring+Hibernate开发环境
- 托奇卡项目团队成员介绍
- 提升外链发布效率的SEO推广神器——搜易达网络推广大师v2.035
- C#打造简易记事本应用详细教程
- 探索虚拟现实地图VR的奥秘
- iOS模拟器屏幕截图新工具
- 深入解析JavaScript在生活应用开发中的运用
- STM32F10x函数库3.5中文版详解与应用
- 猎豹浏览器v6.0.114.13396 r1:安全防护与网购敢赔
- 掌握JS for循环输出的最简洁代码技巧
- Java入门教程:TranslationFileGenerator快速指南
- OpenDDS3.9源码解析及最新文档指南
- JavaScript提示框插件:鼠标滑过显示文章摘要
- MaskRCNN气球数据集:优质图像识别资源
- Laravel日志查看器:实现Apache多站点日志统一管理
