MATLAB中状态空间与传递函数转换实践
版权申诉
200 浏览量
更新于2024-07-02
收藏 2.72MB DOC 举报
"本实验主要探讨了如何在MATLAB环境下将多变量系统的传递函数转换为状态空间表达式,以及反之的过程。实验旨在让学生熟悉状态空间模型的建立,掌握状态空间表达式与传递函数之间的相互转换,并熟练运用MATLAB的相关函数。
实验的核心在于理解和应用状态空间模型和传递函数的基本概念。状态空间表达式是一种描述系统动态行为的数学模型,通常表示为:x'(t) = Ax(t) + Bu(t),y(t) = Cx(t) + Du(t),其中x(t)是系统状态向量,u(t)是输入向量,y(t)是输出向量,A、B、C和D分别是系统矩阵。传递函数则是一种在复频域内描述系统响应的表达方式,G(s) = C(sI - A)^(-1)B + D,其中s是复频率,num(s)和den(s)分别代表传递函数的分子和分母多项式。
MATLAB提供了两个关键函数来处理这两种模型:`ss`函数用于创建状态空间模型,其语法为`sys = ss(A,B,C,D)`;而`tf`函数用于创建传递函数,其语法为`G = tf(num,den)`。此外,`tf2ss`函数可以将传递函数转换为状态空间模型,`ss2tf`函数则相反,将状态空间模型转换为传递函数。对于多输入系统,`ss2tf`函数需要指定输入编号iu。
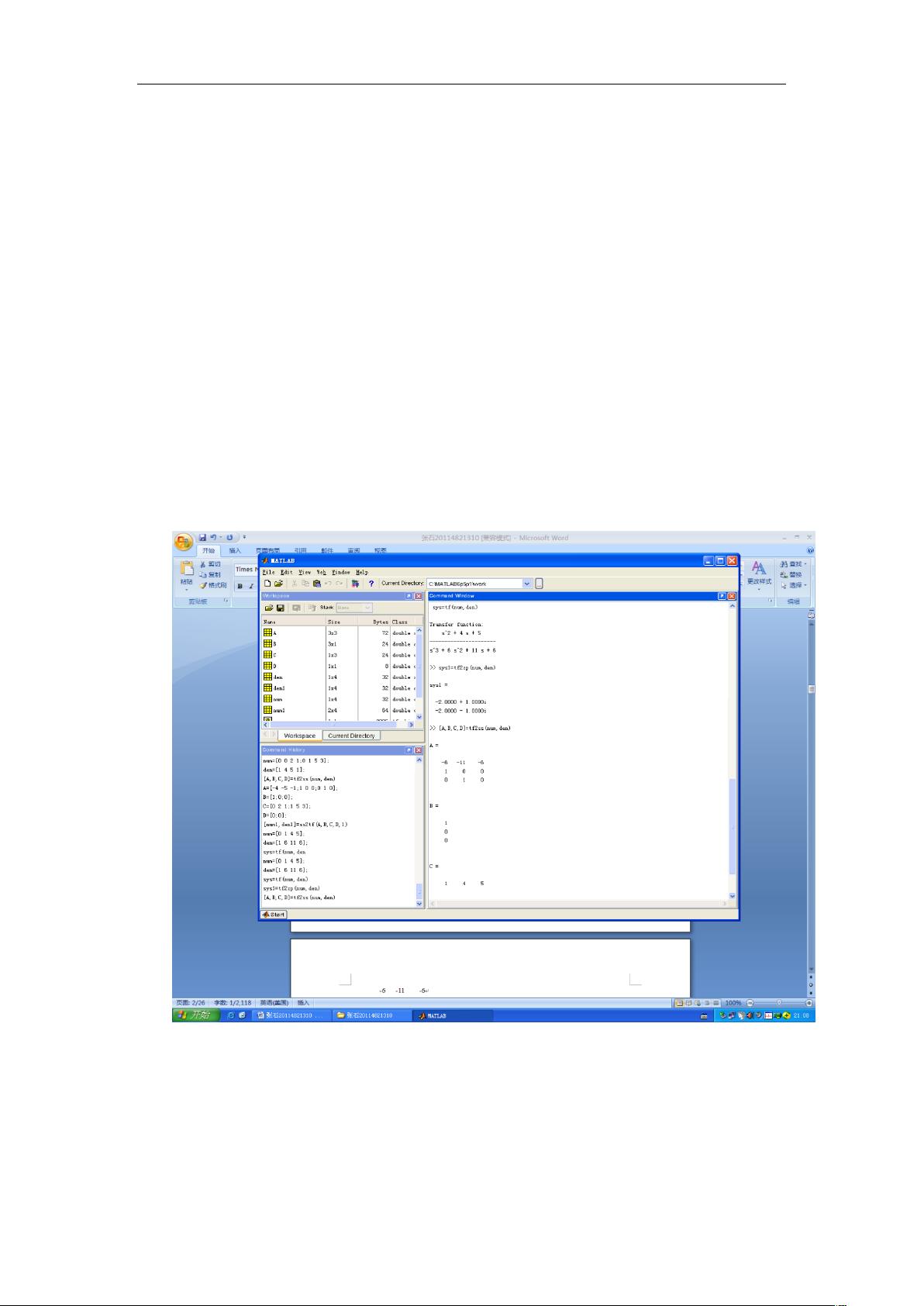
实验步骤中,给出了一个传递函数G(s) = [2/s^3, 5/s^2, 3/s; 1/s^3, 4/s^2, 5/s, 1],并利用`tf2ss`函数求得了对应的A、B、C、D矩阵,然后通过`ss2tf`函数验证了转换的正确性。计算结果显示,A矩阵为[-4 -5 -1; 1 0 0; 0 1 0],B矩阵为[1; 0; 0],C矩阵为[0 2 1; 1 5 3],D矩阵为[0; 0]。
这个实验不仅加深了学生对多变量系统模型的理解,还强化了他们在MATLAB环境中的实际操作技能,为后续的控制系统设计和分析奠定了基础。通过这样的实践,学生能够更加灵活地运用不同模型来描述和处理复杂的系统问题。
.
.
----------------------
s^3 + 6 s^2 + 11 s + 6
>> sys1=tf2zp(num,den)
sys1 = -2.0000 + 1.0000i
-2.0000 - 1.0000i
>> [A,B,C,D]=tf2ss(num,den)
A =6 -11 -6
1 0 0
0 1 0
B =1
0
0
C =1 4 5
D =0
实验 2 状态空间模型系统仿真及状态方程求解
一、实验目的
剩余18页未读,继续阅读
点击了解资源详情
16871 浏览量
点击了解资源详情
点击了解资源详情
177 浏览量
217 浏览量
2024-11-08 上传
点击了解资源详情

omyligaga
- 粉丝: 101
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java Web开发必备:JQuery.js类文件与版本
- TortoiseSVN与VisualSVN在Windows下的应用解析
- C++实现的远程视频监控系统源代码教程
- Coursera IBM数据科学Capstone项目核心实践与分析
- Vue和uni-app项目中优雅修改第三方包指南
- 个人精英商务助理:全方位商务管理工具
- LegendShop开源B2C商城系统部署指南
- Photoshop调色动作包:一键增强色彩效果
- 深入解析三级联动JS+XML技术实现细节
- 快速批量Ping扫描工具:在线及存活主机检测
- 一键删除GameFAQs好友列表上的好友脚本介绍
- 探索i3窗口管理器非官方Fork及其新增功能
- Codeforces ACM竞赛题目集压缩包内容解析
- Java购物车实现及JSTL技术应用
- emp240 PCB自绘板实物验证及文件分享
- 网页自动刷新工具:论坛与游戏的利器
