KUKA机器人技术详解:编程、配置与零点校正
需积分: 13 103 浏览量
更新于2024-07-21
收藏 4.11MB PPT 举报
"这份资料详述了KUKA机器人的系统概述、用户编程、基本配置、网络连接、零点校正等关键信息。其中涵盖了KUKA机器人的硬件组件,如驱动模块、控制系统、MFC模块、DSE、显卡和输入/输出驱动程序的配置。还特别提到了如何进行零点校正,确保机器人精确运作。"
KUKA机器人是全球知名的工业机器人制造商,其产品广泛应用于搬运、打磨、冲孔、压合、涂胶等自动化生产流程。资料中提到的KUKA Roboter系统概述可能包括机器人的设计理念、结构特性、运动范围以及兼容的外围设备。
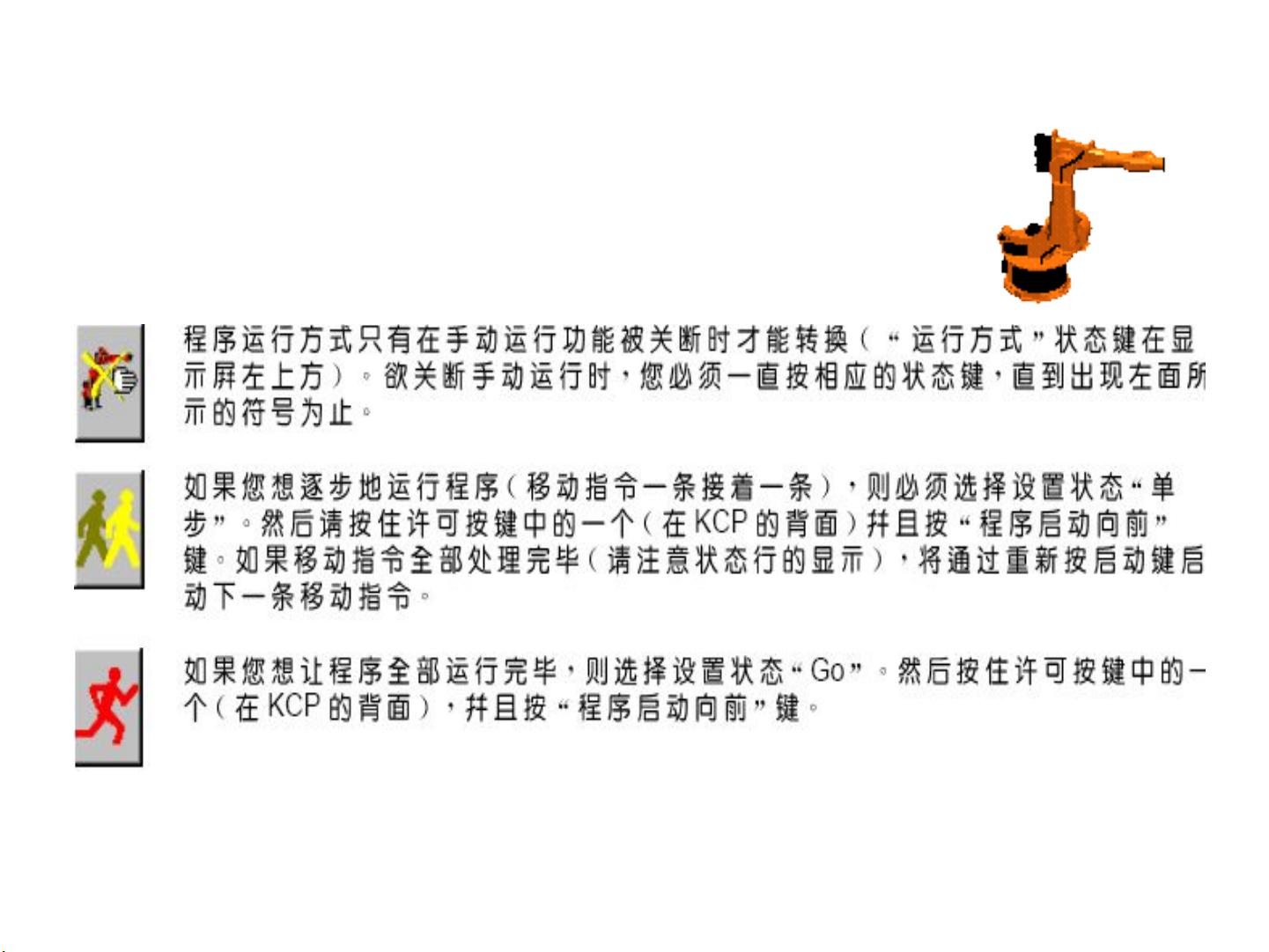
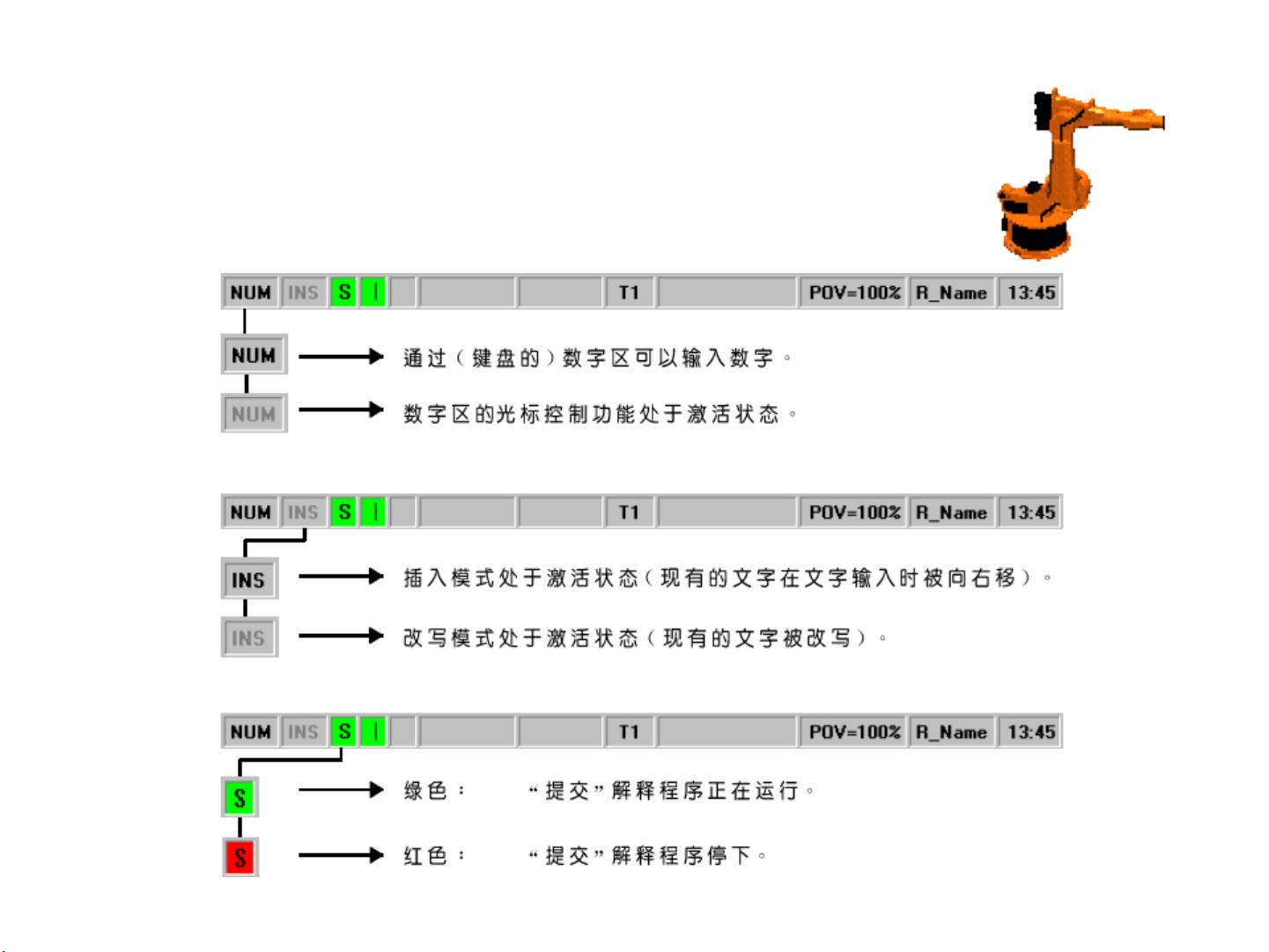
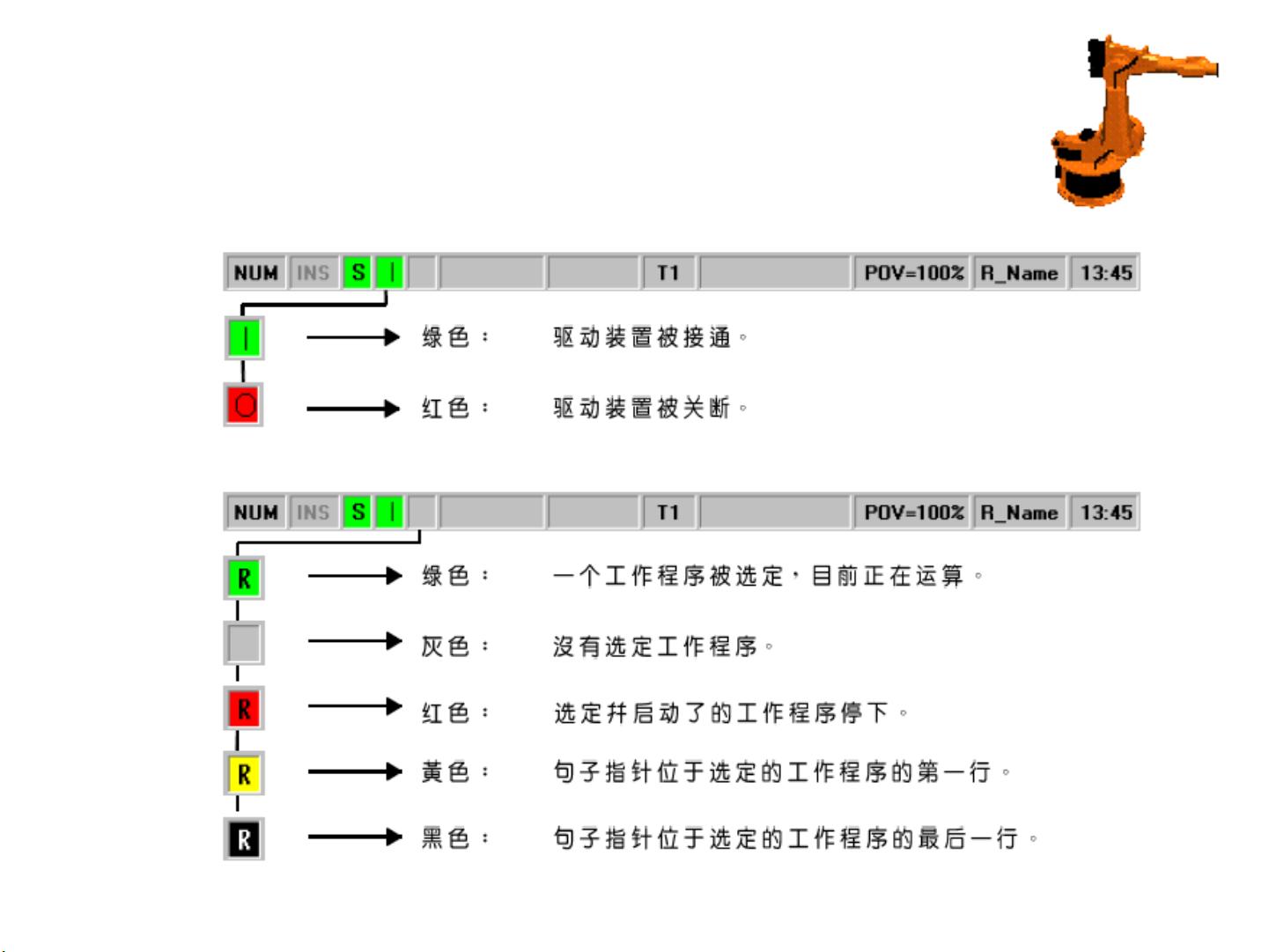
用户编程部分可能涉及KUKA机器人使用的编程语言、编程环境以及编程的基本步骤,这有助于操作者根据具体任务定制机器人的动作序列。
在KUKA Roboter基本配置中,提到了奔腾处理器,它以12MS的时钟周期计算电机的新位置值,确保高精度的运动控制。驱动模块PM6-600(KSD)接收来自DSEAT的数字电流指令,实现无干扰的控制。MFC(Machine and Fieldbus Control)模块作为系统的核心,包含了Ethernet控制器、CANBus接口,以及与KCP(KUKA Control Panel)和PC的通信接口。
DSE(Drive Supervisory Electronics)是负责控制最多8个轴的数字调节单元,监控伺服驱动模块的状态和错误。此外,RDW(Readout and Display Unit)组件为旋转变压器提供电源,进行R/D转换,监测断路和电机温度。
在配置部分,资料提到了“iosys”输入/输出驱动程序,以及INTERBUS配置,这是工业现场总线技术,用于连接和管理现场的各种模块。机械零点校正是确保机器人准确执行任务的关键步骤,需要按照特定顺序对各轴进行校准,消除传动反向间隙。
总结来说,这份资料是KUKA机器人用户的重要参考资料,涵盖了从理论到实践的多个方面,对理解KUKA机器人的工作原理和实际操作具有极高的价值。
剩余63页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2024-05-30 上传
104 浏览量
2024-04-21 上传
2021-11-17 上传

qq_33513604
- 粉丝: 4
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- MeuPrimeiroPacoteR:包装的用途(一行,标题大小写)
- command-asker.js:通过命令行与用户交互的简单方法
- DeathrunMod:AMXX插件
- ElsoKozosMunka
- tyten-game:TYTEN-TAGD Game Jam 2020年Spring
- 基于DS18B20多点测温源码-电路方案
- 戈格克隆
- calibre-web-test:口径网测试
- PEiD_1.1_2022_04_10.7z
- Arduino LEG-项目开发
- SpringCloud-Demo:springcloud演示
- 如果学生的学习时间为9.25小时,则在有监督的机器学习模型上的预测分数
- api-generator:Docpad 源解析器。 生成用于构建文档的 JSON 文件
- TaskScheduler:使用函子,lambda和std
- benthomas325
- Coding-Ninjas-java
