三菱MR-J4-B伺服驱动配置全攻略
需积分: 2 129 浏览量
更新于2024-08-03
收藏 774KB PDF 举报
"本文主要介绍了三菱MR-J4-B系列伺服驱动的使用方法,包括接线、参数配置和程序调用,以及与FX5-80/40SSC运动控制模块的配合。"
三菱MR-J4-B系列伺服驱动是光纤总线型驱动,其特点是使用简便,通常与三菱的FX5-80/40SSC运动控制模块搭配使用。在进行驱动的安装和调试时,需要注意以下关键步骤:
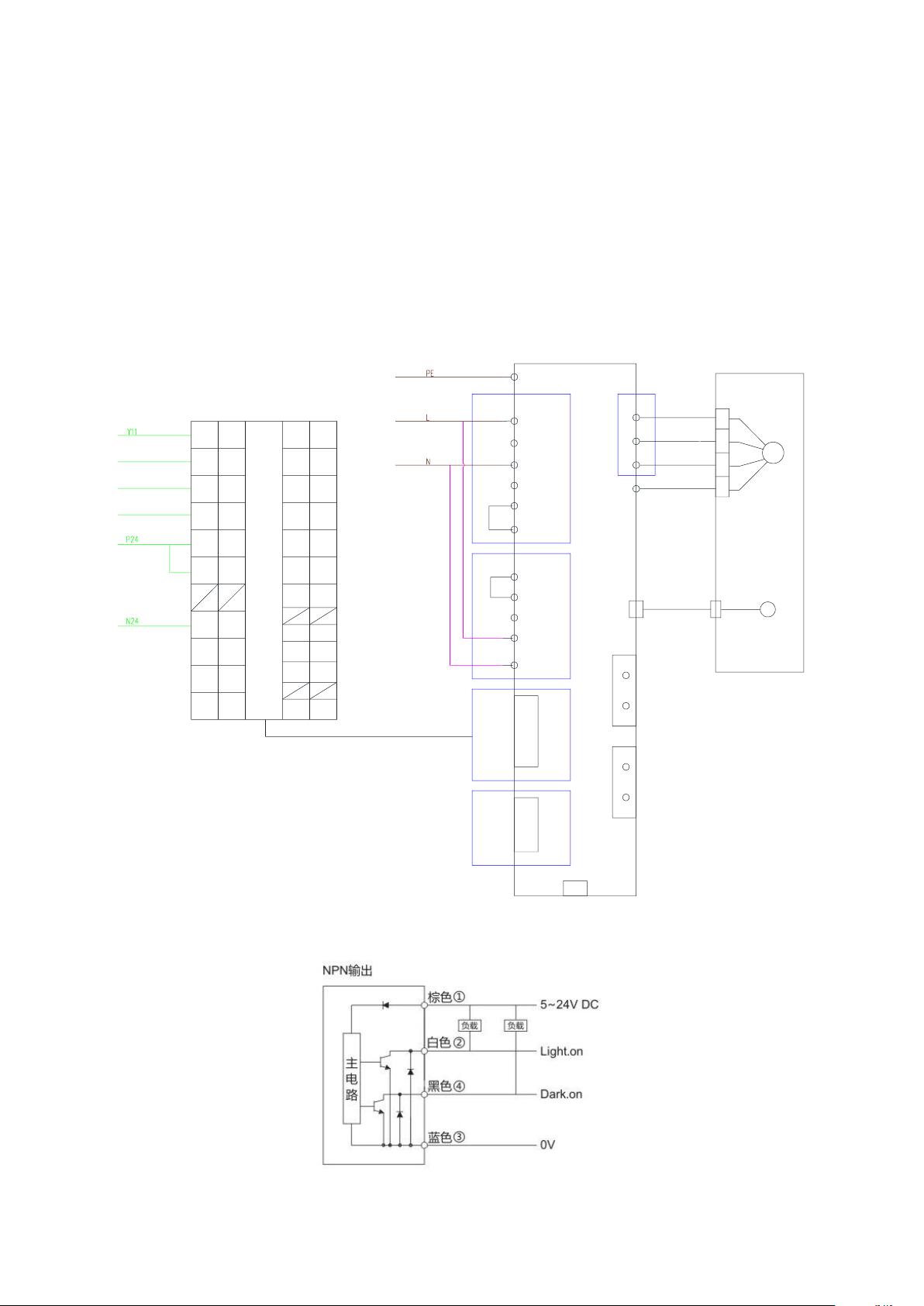
1. 接线:MR-J4-B的接线包括电源线、电机动力线、编码器线和各种限位信号线。CNP1和CNP2端子用于接入电源,只需连接L/N,而CNP3端子用于连接电机动力电缆,CN2端子连接编码器线。CN3端子则用于连接正、负极限和原点限位信号,其中20脚的EM2端子为急停端子,必须连接。
2. 限位信号:正、负限位应接常闭,原点限位接常开。对于槽型光电传感器,信号线的颜色标记有特定含义,例如棕色代表正极,蓝色代表负极,黑色和白色分别代表常开和常闭信号。
3. 减速机配置:在实际应用中,需要确定减速机的减速比,以计算出电机的实际转速和扭矩。
4. 通信网络:MR-J4-B系列伺服驱动应用的是SSCNET光纤总线,这使得它能高效地与其他设备进行通信。
5. 参数配置:配置伺服驱动的参数是关键步骤,包括设置电机型号、控制模式、响应频率、加减速时间等,这些参数直接影响到系统的稳定性和性能。
6. 程序调用:在PLC程序中调用相应的指令来控制伺服驱动,实现精确的定位和速度控制。
7. 安全措施:确保所有安全相关信号如急停(EM2)正确连接,以保证在紧急情况下能够迅速停止设备运行。
8. 连接顺序:CN1A和CN1B是光纤插头,CN1A连接至上一个设备,CN1B连接至下一个设备。若驱动器是系统中的第一个设备,则CN1A直接连接运动控制模块FX5-80/40SSC。
正确理解和操作三菱MR-J4-B系列伺服驱动,包括其接线、配置和与FX5-80/40SSC模块的配合,是确保自动化设备高效、稳定运行的关键。务必遵循上述步骤并参照产品手册,以保证安全和性能。
MR-J4-B 驱动使用调试步骤
1、MR-J4-B 系列驱动为光纤总线型伺服驱动,使用非常方便,需配合三菱的运动控制模块(FX5-80/40SSC)使用;
2、驱动的具体接线方式如下,正负极限及原点信号线缆接在驱动上即可,无需与 PLC 连接,节省了 PLC 的输入触点;
3、CNP1 与 CNP2 端子为电源端,接线方式如下图,仅需连接 L/N 即可,其他默认;
4、CNP3 端子为驱动与电机连接的动力电缆端子,选型时选好电缆型号,直接连接即可,为快插式接头;
5、CN2 为编码器线缆端子,选型时选好电缆型号,直接连接即可,为快插式接头;
6、CN3 端子为多芯端子,根据需要连接相应信号即可,一般按如下图所示连接即可,20 脚(EM2)为急停端子,必须
连接,2(正极限)、12(负极限)、19(原点)、5/10(电源引脚)、3(电源引脚)必须连接;
7、CN1A 和 CN1B 为光纤插头,CN1A 为与上一个设备连接,CN1B 为与下一个设备连接。如果此驱动为第一个设备,
则 CN1A 连接运动控制模块(FX5-80/40SSC);
8、正/负/原点限位接好,正负限位接常闭,原点限位接常开
常规槽型光电:
E
3
11
黑
13
14
伺服驱动器
DOCOM
PE
RLS(反轉極限)
P3
LA
L1
CNP3
16
L11
10
8
V
DI2
P4
2
M
7
LG
CN4
编码器电缆
15
MO2
伺服电机
MBR
CNP1
MO1
L2
EM2
LAR
U
CN3
LZ
P/+
19
红
4
LG
CN2
9
CN5
FLS(正轉極限)
电机
ALM
L21
SD
L3
DI1
17
V
CN3
18
E
DICOM
D
12
W
CN1B
LZR
白
板
1
CN1A
6
DOG(原點信號)
编码器
INP
CNP2
LB
C
5
LBR
U
DI3
N-
20
W
DICOM
下载后可阅读完整内容,剩余8页未读,立即下载
2021-03-16 上传
178 浏览量
2021-06-21 上传
2024-05-30 上传
点击了解资源详情
点击了解资源详情


全村的希望都在我一人
- 粉丝: 1
- 资源: 10
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握Jive for Android SDK:示例应用的使用指南
- Python中的贝叶斯建模与概率编程指南
- 自动化NBA球员统计分析与电子邮件报告工具
- 下载安卓购物经理带源代码完整项目
- 图片压缩包中的内容解密
- C++基础教程视频-数据类型与运算符详解
- 探索Java中的曼德布罗图形绘制
- VTK9.3.0 64位SDK包发布,图像处理开发利器
- 自导向运载平台的行业设计方案解读
- 自定义 Datadog 代理检查:Python 实现与应用
- 基于Python实现的商品推荐系统源码与项目说明
- PMing繁体版字体下载,设计师必备素材
- 软件工程餐厅项目存储库:Java语言实践
- 康佳LED55R6000U电视机固件升级指南
- Sublime Text状态栏插件:ShowOpenFiles功能详解
- 一站式部署thinksns社交系统,小白轻松上手
