CPM:光流与立体声匹配的精细从粗到细 PatchMatch 方法
149 浏览量
更新于2024-08-29
收藏 1.05MB PDF 举报
"本文介绍了一种名为CPM(从粗到细PatchMatch)的匹配方法,该方法结合了有效的随机搜索策略和从粗到细的方案,以解决计算机视觉中的密集对应问题,特别针对光流和立体声匹配。受到最近邻域(NNF)算法的启发,CPM在保持效率的同时,通过引入传播步骤来限制随机搜索半径,从而减少了结果的噪声,提高了对应关系的平滑性。此外,CPM还能够捕捉到具有大运动的微小结构,这是传统从粗到细方法的挑战。与其他NNF技术相比,CPM在处理密集对应关系时表现更优,并且在MPI-Sintel和KITTI数据集上的光流结果优于最新方法,且运行速度更快。"
在深入探讨CPM方法之前,有必要先理解“粗匹配”和“精细匹配”的概念。粗匹配是首先快速寻找大致的对应关系,而精细匹配则是对这些初步结果进行优化,以获得更加精确的对应。在传统的从粗到细方法中,可能会丢失微小结构或在处理大运动时遇到困难。
CPM方法的核心在于其改进的随机搜索策略和全局正则化。随机搜索策略允许快速探索大量可能的对应,而传播步骤则确保了在不同层次间的对应关系的一致性,这在NNF技术中通常是缺失的。通过限制相邻层之间的搜索半径,CPM能够自然地产生平滑的对应关系,减少了不准确和噪声。这种方法特别适合处理密集的对应任务,因为它能够捕捉到即使在大运动背景下也保持一致的微小特征。
为了进一步增强性能,CPM采用了边缘保留插值方法EpicFlow进行插值。EpicFlow是一种先进的光流估计技术,它能够保留图像边缘信息,使得流动估计更加准确。结合CPM,这种方法在实际应用中展现出优越的性能,特别是在MPI-Sintel和KITTI等标准数据集上,其不仅在精度上超越了当前的光流方法,而且在执行速度上也有显著优势。
"粗匹配的精细匹配"这篇文章提出了一种创新的匹配策略,通过结合随机搜索、从粗到细的层次结构和全局正则化,解决了密集对应中的关键挑战。这种方法对于光流和立体匹配等领域具有重要的实用价值,并且在实际应用中已经显示出优于现有技术的性能。
1051-8215 (c) 2016 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TCSVT.2017.2720175, IEEE
Transactions on Circuits and Systems for Video Technology
3
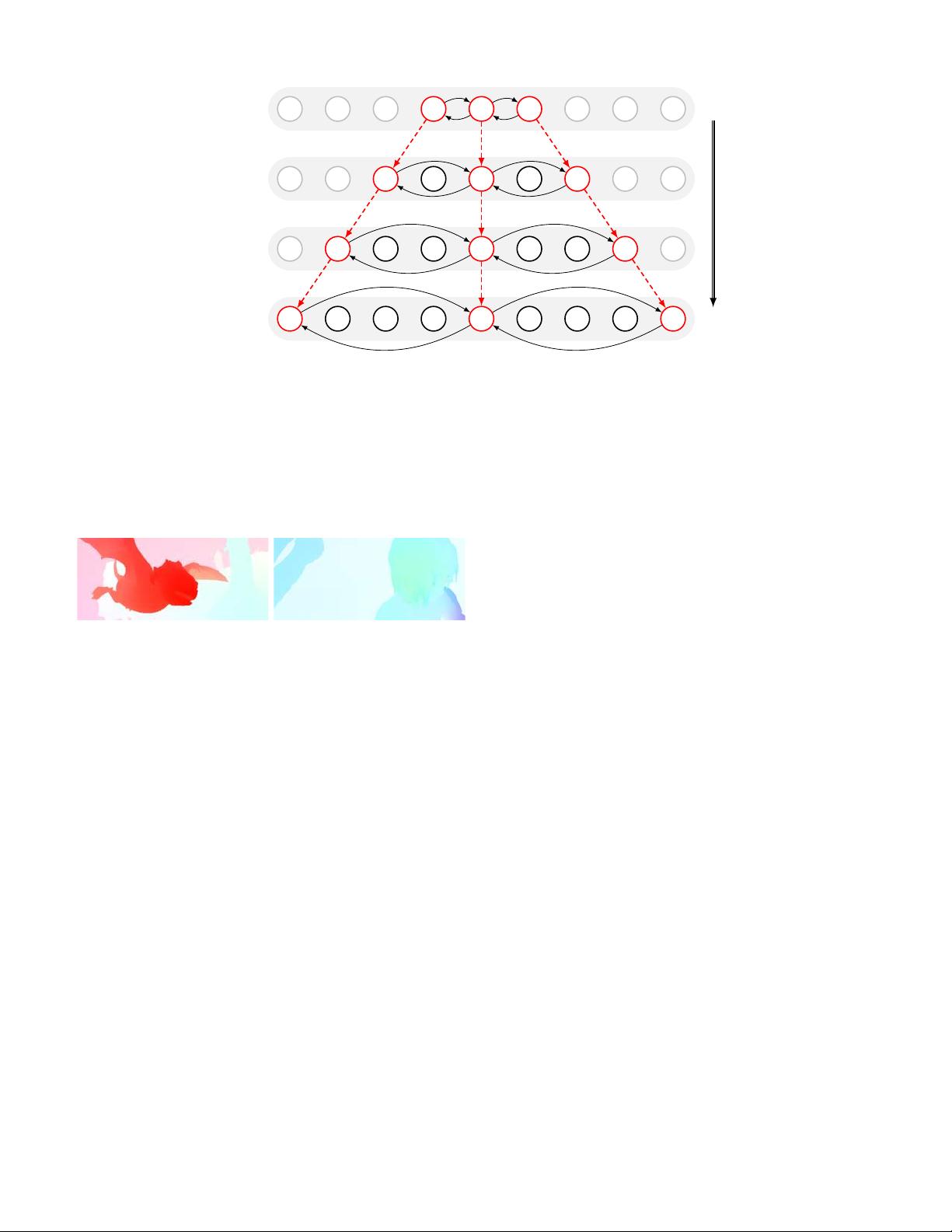
Level 3
Level 2
Level 1
Level 0
Coarse to fine
Fig. 3. Overview of the proposed CPM algorithm. After the construction of the pyramid, we choose seed points on each level (simple grid). The red circles
represent the seeds, and the neighbor propagation is performed between adjacent seeds (black arrows) to propagate good matches to adjacent seeds. For the
coarse-to-fine scheme, the seeds on lower levels are initialized by higher-level seeds (red arrows).
Fig. 4. Example of PatchMatch on grid structure. Each column shows, from
top to bottom, the mean of two consecutive images, the ground truth and
the matching results of CPM with d = 11. Note that even with a large grid
spacing, the result captures most of the motion details.
(top-down) scheme. An overview of CPM matching is given in
Figure 3. We first discuss PatchMatch in Section III-A and then
detail the matching procedure for one level of the pyramid in
Section III-B. Finally, we describe the hierarchical structures
of our approach, as well as the propagation between the levels,
in Section III-C.
A. PatchMatch
The objective of NNF algorithms is to find the most
similar patch of all the patches in one image against another
under some patch distance metric. Connelly et al. proposed
a randomized algorithm, called PatchMatch [5], to efficiently
compute the approximate NNF.
PatchMatch has three main components. First, every pixel in
the image is initialized with either random matching offsets or
some prior information. Next, an iterative refinement process is
applied over every pixel in an interleaved zig-zag and reverse
zig-zag manner, in which good matches are propagated to
adjacent pixels, followed by random search near the current
best matching offset.
neighborhood propagation and random search are the core
ideas of PatchMatch. Propagation is performed under the
assumption that the patch offsets are likely to be the same. For
example, if there is a good match near a pixel, the matching
of this pixel will be updated by the matching of the neighbor
if the patch distance (according to some patch distance metric)
of the neighbor is smaller. After propagation, a sequence of
randomly selected candidate offsets will be tested to improve
the current matching. The propagation and random search are
performed iteratively until convergence occurs or some fixed
iteration numbers are achieved. We refer readers to [5] for
more detailed information.
PatchMatch has shown clear advantages in scene corre-
spondence [8] and structural image editing [5]. However, the
computed NNF is often very noisy because of the lack of
global regularization. We introduce a coarse-to-fine structure
within the PatchMatch framework, which can reduce the noise
significantly (see Figure 1(d)).
B. PatchMatch on Grid Structure
Considering the nature of the smoothness of optical flow
compared with that of the NNF, we define our goal of matching
as finding the best match of some seeds rather than every
pixel of the image for efficiency. Formally, given two images
I
1
, I
2
⊂ R
2
and a collection of seeds S = {s
m
} at position
{p(s
m
)}, our goal is to determine the flow of each seed
f(s
m
) = M(p(s
m
)) − p(s
m
) ∈ R
2
, where M(p(s
m
)) is
the corresponding matching position in I
2
for seed s
m
in I
1
.
In our method, the seeds are the cross points of the regular
image grid with a spacing of d pixels. Then, there is only one
seed in every d × d non-overlapping block (see Figure 4). We
will show that this fast approximation results in a significant
speed-up with controllable accuracy.
Adopting the regular image grid, we obtain a default neigh-
bor system according to the spatial adjacency of the seeds on
the image grid. As in PatchMatch, neighborhood propagation
剩余11页未读,继续阅读
2021-02-05 上传
2016-01-08 上传
2016-01-08 上传
2021-05-19 上传
2021-09-07 上传
2022-07-14 上传
2022-07-11 上传
2020-10-24 上传
2016-01-26 上传

weixin_38638647
- 粉丝: 7
- 资源: 993
 我的内容管理
展开
我的内容管理
展开







最新资源
- Android圆角进度条控件的设计与应用
- mui框架实现带侧边栏的响应式布局
- Android仿知乎横线直线进度条实现教程
- SSM选课系统实现:Spring+SpringMVC+MyBatis源码剖析
- 使用JavaScript开发的流星待办事项应用
- Google Code Jam 2015竞赛回顾与Java编程实践
- Angular 2与NW.js集成:通过Webpack和Gulp构建环境详解
- OneDayTripPlanner:数字化城市旅游活动规划助手
- TinySTM 轻量级原子操作库的详细介绍与安装指南
- 模拟PHP序列化:JavaScript实现序列化与反序列化技术
- ***进销存系统全面功能介绍与开发指南
- 掌握Clojure命名空间的正确重新加载技巧
- 免费获取VMD模态分解Matlab源代码与案例数据
- BuglyEasyToUnity最新更新优化:简化Unity开发者接入流程
- Android学生俱乐部项目任务2解析与实践
- 掌握Elixir语言构建高效分布式网络爬虫
